ลด Range Anxiety EV และปรับปรุงความปลอดภัยโดยใช้การควบคุมมอเตอร์ FOC ในตัวและเซ็นเซอร์ขั้นสูง
Contributed By DigiKey's North American Editors
2022-01-05
นักออกแบบรถยนต์ไฟฟ้า (EV) และระบบรถยนต์ไฟฟ้าไฮบริด (HEV) (มักเรียกว่า xEV) อยู่ภายใต้แรงกดดันอย่างต่อเนื่องเพื่อให้รถสามารถวิ่งได้ระยะทางไกลขึ้นต่อการชาร์จหนึ่งครั้ง เพื่อลดความวิตกกังวลและลดการเกิดคาร์บอนในรถยนต์ ในเวลาเดียวกัน พวกเขาจำเป็นต้องเพิ่มมอเตอร์, เซ็นเซอร์, อุปกรณ์อิเล็กทรอนิกส์ที่เกี่ยวข้อง, โปรเซสเซอร์และซอฟต์แวร์เพื่อให้สอดคล้องกับระดับความเป็นอิสระของรถ คุณลักษณะของผู้ใช้ และความปลอดภัยในระดับที่สูงขึ้น ในขณะที่ต้องลดต้นทุนอีกด้วย
มอเตอร์สำหรับประตู, หน้าต่าง, พัดลมระบายความร้อนของแบตเตอรี่, พัดลมหม้อน้ำและปั๊ม และคุณสมบัติอื่น ๆ เป็นปัญหาที่ยุ่งยากอย่างยิ่ง เนื่องจากไม่เพียงแต่เพิ่มน้ำหนักเท่านั้น แต่ยังต้องใช้อัลกอริธึมการควบคุมขั้นสูง เช่น Field-Oriented Control (FOC) เพื่อลดเสียงรบกวนและ การใช้พลังงานในขณะที่ให้การตอบสนองที่ราบรื่น งานออกแบบระบบโดยรวมมีความซับซ้อนเนื่องจากต้องปฏิบัติตามข้อกำหนดด้านความปลอดภัยในการใช้งาน ISO 26262 และมาตรฐานคุณภาพ AEC-Q100 ด้วย
เพื่อตอบสนองความท้าทายเหล่านี้ นักออกแบบสามารถหันไปใช้อุปกรณ์ที่มีคุณสมบัติสำหรับยานยนต์ที่หลากหลายซึ่งมีฮาร์ดแวร์และซอฟต์แวร์ในระดับที่สูงขึ้น ซึ่งทำให้การออกแบบและการผสานรวมฟังก์ชันต่าง ๆ ง่ายขึ้น ในขณะที่ลดจำนวนชิ้นส่วนและปริมาณการใช้โดยรวม
บทความนี้กล่าวถึงปัญหาที่นักออกแบบ EVs และ HEV ต้องเผชิญ จากนั้นจะแนะนำและแสดงวิธีใช้ตัวควบคุมมอเตอร์กระแสตรงแบบไม่มีแปรงถ่าน FOC (BLDC) แบบบูรณาการสูงและบอร์ดประเมินผลที่เกี่ยวข้องเพื่อเริ่มต้นการออกแบบมอเตอร์ EV/HEV ที่มีประสิทธิภาพ นอกจากนี้ยังนำเสนอเซ็นเซอร์ต่าง ๆ เพื่อตรวจสอบกระแส, ตำแหน่ง 3 มิติ, ความเร็วและทิศทาง ทั้งหมดนี้จากแหล่งเดียวคือ Allegro MicroSystems
ปัญหาด้านค่าใช้จ่าย ความปลอดภัย และความวิตกกังวลเกี่ยวกับระยะที่ EVs เผชิญอยู่
ปัญหาที่นักออกแบบของ xEV ต้องแก้ไขมีมากมาย รวมถึงค่าใช้จ่ายของรถ ความปลอดภัย และความน่าเชื่อถือ โดยเฉพาะอย่างยิ่งในแง่ของความเป็นอิสระของรถที่เพิ่มขึ้น ระยะการขับขี่ต่อการชาร์จ (ความวิตกกังวลช่วง) และอายุการใช้งานของแบตเตอรี่
เพื่อรองรับความปลอดภัยและความน่าเชื่อถือ เซ็นเซอร์ขั้นสูงจึงมีความจำเป็นที่ตรงตามข้อกำหนดของฟังก์ชันระบบช่วยเหลือผู้ขับขี่ขั้นสูง (ADAS) ตามที่กำหนดไว้ใน ISO 26262 ในด้านราคาและช่วงการใช้งาน นักออกแบบหันไปใช้รางไฟฟ้าแรงสูงที่สูงถึง 800 โวลต์เพื่อประสิทธิภาพที่มากขึ้นและน้ำหนักสายเคเบิลที่ลดลง ในขณะที่ยังใช้ประโยชน์จากการปรับปรุงการออกแบบชุดแบตเตอรี่อีกด้วย
ตัวอย่างเช่น การจัดการความร้อนของแบตเตอรี่ที่ดีขึ้นมีส่วนทำให้ระยะการขับขี่และอายุการใช้งานแบตเตอรี่ยาวนานขึ้น ในขณะที่การระบายความร้อนที่ดีขึ้นสำหรับอินเวอร์เตอร์ฉุด EV และ HEV จะช่วยเพิ่มความหนาแน่นของพลังงานและพลังงานและลดน้ำหนัก
ในขณะที่การรวมอุปกรณ์เซมิคอนดักเตอร์ในระดับที่สูงขึ้นช่วยให้สามารถทำงานได้มากขึ้นโดยมีน้ำหนักและพื้นที่น้อยลง มอเตอร์ BLDC ที่จำเป็นสำหรับพัดลมระบายความร้อนที่จำเป็นจะต้องได้รับการควบคุมอย่างแน่นหนาเพื่อเพิ่มประสิทธิภาพสูงสุด เพื่อให้บรรลุสิ่งนี้ การรวมอัลกอริธึมการควบคุมมอเตอร์ขั้นสูง เช่น FOC บนไดรเวอร์เกทตัวควบคุมมอเตอร์จะมีประโยชน์
ระบบระบายความร้อนประสิทธิภาพสูง
FOC ช่วยให้มอเตอร์ไฟฟ้าทำงานได้อย่างราบรื่นตลอดช่วงความเร็วทั้งหมด และสามารถสร้างแรงบิดเต็มที่เมื่อสตาร์ทเครื่อง นอกจากนี้ FOC ยังให้การเร่งความเร็วและการชะลอตัวของมอเตอร์ที่รวดเร็วและราบรื่น ซึ่งเป็นคุณสมบัติที่มีประโยชน์สำหรับการควบคุมที่แม่นยำในการใช้งานการเคลื่อนไหวที่มีประสิทธิภาพสูง สามารถใช้ FOC เพื่อพัฒนาไดรเวอร์แรงดันไฟฟ้าต่ำ (LV) ที่มีประสิทธิภาพสูง กะทัดรัด และเงียบ (50 โวลต์ DC และต่ำกว่า) สำหรับมอเตอร์ BLDC ประสิทธิภาพสูงรุ่นต่าง ๆ ที่มีกำลังไฟสูงถึง 500 วัตต์ โดยทั่วไปจะใช้ในพัดลมระบายความร้อนแบตเตอรี่แรงดันสูง xEV (HV) เช่นเดียวกับเครื่องเป่าลมร้อนและพัดลมปรับอากาศ (HVAC) และปั๊มของเหลวสำหรับระบบทำความเย็นอินเวอร์เตอร์ฉุด HV (รูปที่ 1)
") รูปที่ 1: ตัวควบคุมมอเตอร์ FOC สามารถใช้พลังงานแบตเตอรี่ LV เพื่อทำให้แบตเตอรี่ xEV HV และอินเวอร์เตอร์ลาก HV เย็นลง (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 1: ตัวควบคุมมอเตอร์ FOC สามารถใช้พลังงานแบตเตอรี่ LV เพื่อทำให้แบตเตอรี่ xEV HV และอินเวอร์เตอร์ลาก HV เย็นลง (ที่มาของรูปภาพ: Allegro MicroSystems)
ในการออกแบบทั่วไป FOC ใช้กับเซ็นเซอร์ภายนอกโดยใช้ไมโครคอนโทรลเลอร์ การออกแบบเหล่านี้เรียกว่า FOC โดยตรง การออกแบบเหล่านี้อาจซับซ้อน และมักจะได้รับผลกระทบจากการตอบสนองแบบไดนามิกที่ลดลงเนื่องจากการพึ่งพาเซ็นเซอร์ภายนอกในการวัดพารามิเตอร์การทำงานของมอเตอร์
FOC ที่ปรับปรุงประสิทธิภาพและลดต้นทุนสามารถทำได้โดยการกำจัดเซ็นเซอร์ภายนอก
ข้อมูลจากเซ็นเซอร์ที่หายไปยังคงมีความจำเป็นในการใช้งาน FOC และสามารถดึงออกมาจากแรงดันและกระแสที่ขั้วมอเตอร์จากแรงเคลื่อนไฟฟ้าด้านหลัง (BEMF) ในขดลวดของมอเตอร์ได้ แม้ว่าฮาร์ดแวร์จะง่ายกว่า แต่การใช้งาน FOC แบบไร้เซ็นเซอร์นั้นต้องการซอฟต์แวร์ควบคุมที่ซับซ้อนมากขึ้น
อัลกอริธึม FOC แบบไร้เซนเซอร์สามารถให้ประสิทธิภาพสูงสุดและการตอบสนองแบบไดนามิกในขณะที่ลดเสียงรบกวน นอกจากนี้ยังให้การเริ่มต้นแบบ open-loop ที่แข็งแกร่งเมื่อมอเตอร์หยุดนิ่งเมื่อไม่มีข้อมูล BEMF
Easy FOC สำหรับพัดลมระบายความร้อนรถยนต์และปั๊ม
ในขณะที่ไดรเวอร์ FOC BLDC ส่วนใหญ่ต้องการให้นักพัฒนาซอฟต์แวร์เขียนและพอร์ตอัลกอริธึมไปยังไมโครโปรเซสเซอร์หรือไมโครคอนโทรลเลอร์ A89307KETSR-J จาก Allegro MicroSystems รวมอัลกอริธึม FOC แบบไร้เซ็นเซอร์เข้ากับไดรเวอร์เกทโดยตรง ด้วยส่วนประกอบแบบพาสซีฟภายนอกเพียงห้าชิ้น (ตัวเก็บประจุสี่ตัวและตัวต้านทานหนึ่งตัว) A89307KETSR-J ยังลดค่าวัสดุ (BOM) ให้น้อยที่สุด เพิ่มความน่าเชื่อถือ และลดความซับซ้อนในการออกแบบ (รูปที่ 2)
") รูปที่ 2: วงจรการใช้งานพัดลมระบายความร้อนของชุดแบตเตอรี่ A89307KETSR-J xEV ทั่วไปแสดงส่วนประกอบภายนอกห้าส่วนประกอบ: ตัวเก็บประจุสี่ตัวและตัวต้านทานหนึ่งตัว (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 2: วงจรการใช้งานพัดลมระบายความร้อนของชุดแบตเตอรี่ A89307KETSR-J xEV ทั่วไปแสดงส่วนประกอบภายนอกห้าส่วนประกอบ: ตัวเก็บประจุสี่ตัวและตัวต้านทานหนึ่งตัว (ที่มาของรูปภาพ: Allegro MicroSystems)
ไดรเวอร์เกท A89307KETSR-J ทำงานตั้งแต่ 5.5 ถึง 50 โวลต์ DC อัลกอริธึม FOC แบบบูรณาการประกอบด้วยแรงบิดคงที่และกำลังคงที่ตลอดจนโหมดการทำงานแบบวงเปิดและความเร็วคงที่ A89307KETSR-J มีอินพุตสำหรับการปรับความกว้างพัลส์ (PWM) หรือการควบคุมความเร็วของโหมดนาฬิกา การเบรก และทิศทาง และสัญญาณเอาต์พุตสำหรับสภาวะความผิดปกติและความเร็วของมอเตอร์ (รูปที่ 3)
") รูปที่ 3: บล็อกไดอะแกรมภายในของ A89307KETSR-J แสดงตัวควบคุม FOC (ตรงกลาง), PWM หรือการควบคุมความเร็วของโหมดนาฬิกา (SPD), อินพุตเบรก (เบรก) และทิศทาง (DIR) (ทางด้านซ้าย) และความผิดปกติ (FAULT) ) และเอาต์พุตความเร็วมอเตอร์ (FG) (ทางด้านซ้ายด้วย) (ภาพ: Allegro MicroSystems)
รูปที่ 3: บล็อกไดอะแกรมภายในของ A89307KETSR-J แสดงตัวควบคุม FOC (ตรงกลาง), PWM หรือการควบคุมความเร็วของโหมดนาฬิกา (SPD), อินพุตเบรก (เบรก) และทิศทาง (DIR) (ทางด้านซ้าย) และความผิดปกติ (FAULT) ) และเอาต์พุตความเร็วมอเตอร์ (FG) (ทางด้านซ้ายด้วย) (ภาพ: Allegro MicroSystems)
A89307KETSR-J ได้รับการปรับให้เหมาะสมเพื่อขับเคลื่อน MOSFET พลังงาน N-channel ที่มีความต้านทานต่ำ มันสามารถจ่ายกระแสไฟไดรฟ์พีคขนาดใหญ่ที่จำเป็นในการ "เปิด" และ "ปิด" ของ MOSFET อย่างรวดเร็ว เพื่อลดการกระจายพลังงานในระหว่างการสลับ ปรับปรุงประสิทธิภาพการทำงาน และลดความกังวลในการจัดการระบายความร้อน ไดรฟ์เกตหลายระดับพร้อมใช้งาน ช่วยให้นักออกแบบสามารถเพิ่มประสิทธิภาพการแลกเปลี่ยนระหว่างการปล่อยสัญญาณรบกวนแม่เหล็กไฟฟ้า (EMI) และประสิทธิภาพได้ การเปิดใช้งาน MOSFET อย่างรวดเร็วช่วยลดการสูญเสียจากสวิตชิ่ง แต่เพิ่ม EMI ในขณะที่การเปิด MOSFET ที่ช้าลงจะลด EMI โดยการแลกเปลี่ยนจะเพิ่มการสูญเสียจากสวิตชิ่งและประสิทธิภาพที่ต่ำลง
สามารถควบคุมความเร็วของมอเตอร์ได้ผ่านอินพุต PWM, อนาล็อก หรือ CLOCK การควบคุมความเร็วแบบวงปิดเป็นตัวเลือก โดยมีอัตราส่วนความถี่ต่อนาฬิกาต่อรอบต่อนาที (RPM) ที่ตั้งโปรแกรมได้ การควบคุมการเริ่มต้นทำงานแบบไม่ใช้เซ็นเซอร์ประกอบด้วยการตรวจจับและการซิงโครไนซ์ล่วงหน้าสำหรับการหมุนล่วงหน้าและย้อนกลับ (กังหันลม) ทำให้ A89307KETSR-J ทำงานผ่านการกำหนดค่ามอเตอร์และโหลดที่หลากหลาย
อัลกอริธึม Non-Reverse Startup ของ Allegro MicroSystems ยังช่วยปรับปรุงประสิทธิภาพการเริ่มต้นระบบอีกด้วย มอเตอร์จะสตาร์ทในทิศทางที่ถูกต้องหลังจากเปิดเครื่องโดยไม่มีการสั่นสะเทือนย้อนกลับหรือสั่น ฟีเจอร์ Soft-On-Soft-Off จะค่อยๆ เพิ่มกระแสให้มอเตอร์ด้วยคำสั่ง “เปิด” (สภาวะกังหันลม) และค่อยๆ ลดกระแสจากมอเตอร์ด้วยคำสั่ง “off” เพื่อลดเสียงรบกวนลงต่อไป (ภาพที่ 4 ).
 รูปที่ 4: รูปคลื่นกระแส A89307KETSR-J สำหรับ "เปิด" ที่นุ่มนวล (ด้านบน) และ "ปิด" ที่นุ่มนวล (ด้านล่าง) ส่งผลให้การทำงานของมอเตอร์ราบรื่นและลดเสียงรบกวน (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 4: รูปคลื่นกระแส A89307KETSR-J สำหรับ "เปิด" ที่นุ่มนวล (ด้านบน) และ "ปิด" ที่นุ่มนวล (ด้านล่าง) ส่งผลให้การทำงานของมอเตอร์ราบรื่นและลดเสียงรบกวน (ที่มาของรูปภาพ: Allegro MicroSystems)
A89307KETSR-J มีอินเทอร์เฟซ I2C สำหรับตั้งค่ากระแสไฟที่กำหนดของมอเตอร์ แรงดันไฟฟ้า ความเร็ว ความต้านทาน และโปรไฟล์การเริ่มต้นใช้งาน I2C ยังใช้การเปิด/ปิดและการควบคุมความเร็ว ตลอดจนการตอบสนองความเร็วและสัญญาณความผิดปกติ
บอร์ด Eval FOC แบบไร้เซนเซอร์
นักออกแบบสามารถใช้ APEK89307KET-01-T-DK กระดานประเมินผลและ ซอฟต์แวร์ที่เกี่ยวข้อง เพื่อเร่งการพัฒนามอเตอร์ไดรฟ์ BLDC ที่ใช้ FOC โดยใช้ A89307KETSR-J (รูปที่ 5) บอร์ดนี้ประกอบด้วย A89307KETSR-J ที่สามารถเข้าถึงพินอินพุตและเอาต์พุตทั้งหมด พร้อมสเตจกำลังไฟฟ้าสามเฟสที่สมบูรณ์สำหรับการขับมอเตอร์ BLDC นักออกแบบสามารถเลือกพารามิเตอร์ของไดรฟ์ FOC โดยใช้อินเทอร์เฟซผู้ใช้แบบกราฟิก (GUI) อย่างง่าย และโหลดลงใน EEPROM บนชิป ความต้องการ BOM ขั้นต่ำของ A89307KETSR-J ช่วยให้สามารถออกแบบไดรฟ์ให้พอดีกับตัวมอเตอร์ได้ ซึ่งช่วยลดขนาดของโซลูชันได้อีก
 รูปที่ 5: บอร์ด APEK89307KET-01-T-DK eval มี A89307KETSR-J (U1 ด้านซ้ายตรงกลางของบอร์ด) และ MOSFET กำลัง 6 ตัว (ด้านขวามือ) เพื่อขับเคลื่อนมอเตอร์ BLDC (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 5: บอร์ด APEK89307KET-01-T-DK eval มี A89307KETSR-J (U1 ด้านซ้ายตรงกลางของบอร์ด) และ MOSFET กำลัง 6 ตัว (ด้านขวามือ) เพื่อขับเคลื่อนมอเตอร์ BLDC (ที่มาของรูปภาพ: Allegro MicroSystems)
เซ็นเซอร์สำหรับ ADAS
นักออกแบบระบบ xEV จำเป็นต้องรับรู้ระดับปัจจุบันในมอเตอร์ไดรฟ์ ตัวแปลง DC-DC และอินเวอร์เตอร์ ตลอดจนตำแหน่งโรตารี่ของวาล์วปีกผีเสื้อและกระบอกสูบ และความเร็วและทิศทางของเกียร์ในการส่งสัญญาณเพื่อให้มีขนาดกะทัดรัดและคุ้มค่า ฟังก์ชัน ADAS Allegro MicroSystems นำเสนอโซลูชันเซ็นเซอร์ที่หลากหลายสำหรับ ADAS รวมถึง:
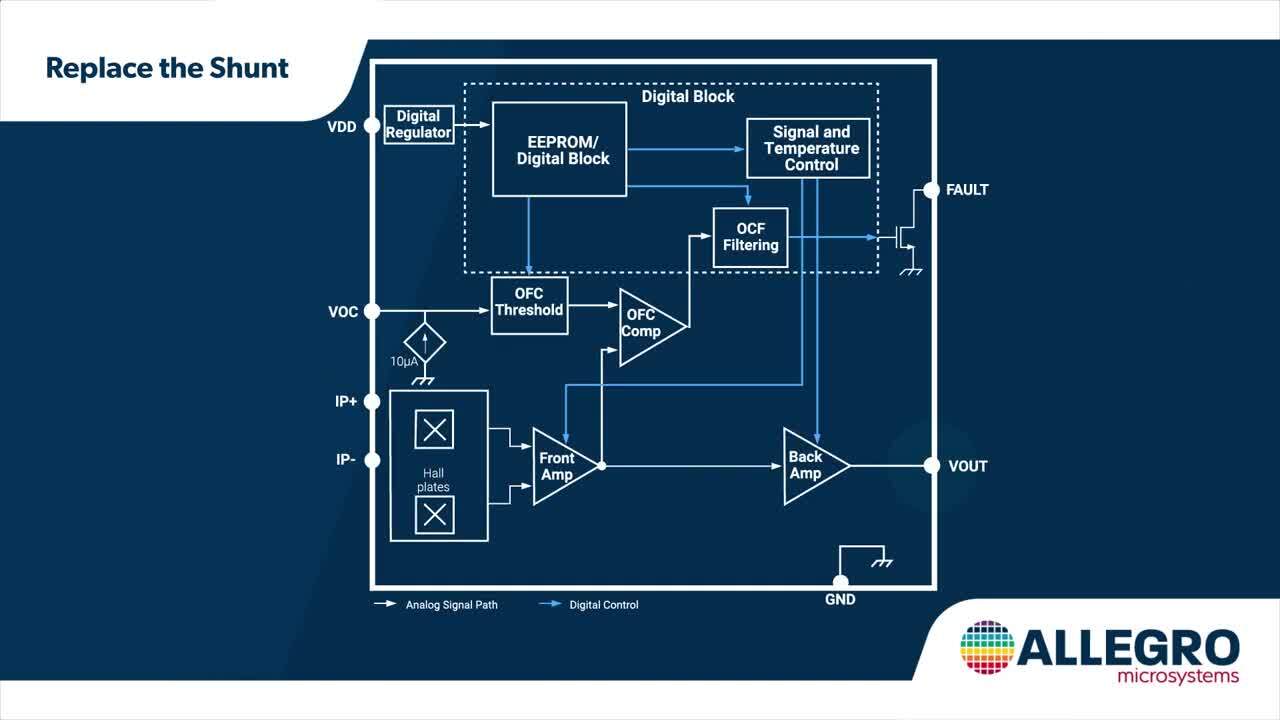
เซ็นเซอร์กระแส: ACS72981KLRATR-150B3 มอบการตรวจจับกระแสไฟ AC หรือ DC ที่ประหยัดและแม่นยำให้กับนักออกแบบ เซ็นเซอร์กระแส Hall-effect เชิงเส้นที่มีความแม่นยำสูงนี้มีแบนด์วิดท์ 250 กิโลเฮิรตซ์ (kHz) และออกแบบมาเพื่อใช้ในการควบคุมมอเตอร์ การควบคุมตัวแปลง DC-DC การควบคุมอินเวอร์เตอร์ และการตรวจจับและการจัดการโหลด เป็น IC ที่ผ่านการรับรอง AEC-Q100 และมีเวลาตอบสนอง <2 ไมโครวินาที (µs) ซึ่งสนับสนุนความต้องการการตรวจจับข้อผิดพลาดกระแสเกินอย่างรวดเร็วของแอปพลิเคชันที่มีความสำคัญต่อความปลอดภัย
เซ็นเซอร์ตำแหน่ง 3D: การตรวจจับตำแหน่งแม่เหล็ก 3 มิติเชิงเส้นและแบบหมุนแบบไม่สัมผัสสำหรับการตรวจจับปีกผีเสื้อ วาล์ว กระบอกสูบ และตำแหน่งเกียร์ สามารถใช้งานได้อย่างรวดเร็วโดยใช้ IC 3DMAG ของ Allegro MicroSystems A31315LOLATR-XY-S-SE-10 อุปกรณ์สามารถวัดการเคลื่อนที่แบบหมุนในระนาบแนวนอนและแนวตั้ง และวัดการเคลื่อนที่เชิงเส้นจากด้านหนึ่งไปอีกด้านหนึ่งหรือจากด้านหน้าไปด้านหลัง (ภาพที่ 6)
 รูปที่ 6: เซ็นเซอร์ตำแหน่ง 3 มิติ A31315LOLATR-XY-S-SE-10 สามารถวัดการเคลื่อนที่แบบหมุนในระนาบแนวนอนและแนวตั้ง และวัดการเคลื่อนที่เชิงเส้นจากด้านหนึ่งไปอีกด้านหนึ่ง หรือจากด้านหน้าไปด้านหลัง (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 6: เซ็นเซอร์ตำแหน่ง 3 มิติ A31315LOLATR-XY-S-SE-10 สามารถวัดการเคลื่อนที่แบบหมุนในระนาบแนวนอนและแนวตั้ง และวัดการเคลื่อนที่เชิงเส้นจากด้านหนึ่งไปอีกด้านหนึ่ง หรือจากด้านหน้าไปด้านหลัง (ที่มาของรูปภาพ: Allegro MicroSystems)
เซ็นเซอร์ A31315LOLATR-XY-S-SE-10 ให้นักออกแบบสามารถเลือกรูปแบบเอาต์พุตแบบส่งแบบ Nibble แบบขอบเดียวแบบอัตราส่วน, PWM หรือ SAE J2716 ได้รับการพัฒนาเพื่อให้ตรงตามมาตรฐาน ISO 26262 ASIL B (แม่พิมพ์เดี่ยว ในแพ็คเกจ SOIC-8) และ ASIL D (แม่พิมพ์คู่ซ้ำซ้อน ในแพ็คเกจ TSSOP-14) ในระบบยานยนต์ที่เกี่ยวข้องกับความปลอดภัย
ความเร็วและทิศทาง: ATS19520LSNBTN-RSWHPYU เป็นเซ็นเซอร์วัดฟันเฟืองและเฟืองเกียร์ที่ทนทานต่อการสั่นสะเทือนและเฟืองท้าย โดยมีรุ่นให้เลือกสำหรับการตรวจจับทิศทางไปข้างหน้าและถอยหลัง (รูปที่ 7)
 รูปที่ 7: ตัวแปร "F" ที่แสดงของ ATS19520 จะวัดการหมุนไปข้างหน้าเมื่อฟันเฟืองผ่านจากพิน 1 ถึงพิน 3 (บน) และการหมุนย้อนกลับเมื่อฟันเฟืองผ่านจากพิน 3 ถึงพิน 1 (ด้านล่าง) ตัวแปร “R” วัดการหมุนไปในทิศทางตรงกันข้าม (ที่มาของรูปภาพ: Allegro MicroSystems)
รูปที่ 7: ตัวแปร "F" ที่แสดงของ ATS19520 จะวัดการหมุนไปข้างหน้าเมื่อฟันเฟืองผ่านจากพิน 1 ถึงพิน 3 (บน) และการหมุนย้อนกลับเมื่อฟันเฟืองผ่านจากพิน 3 ถึงพิน 1 (ด้านล่าง) ตัวแปร “R” วัดการหมุนไปในทิศทางตรงกันข้าม (ที่มาของรูปภาพ: Allegro MicroSystems)
เซ็นเซอร์ที่ได้รับการจัดอันดับ ISO 26262 ASIL B มีการวินิจฉัยแบบบูรณาการและเหมาะสำหรับการใช้งานในระบบขับเคลื่อน xEV แพ็คเกจ single-in-line แบบสามขา (SIP) ประกอบด้วยแม่เหล็กแบ็คไบแอสในตัวเพื่อวัดความเร็วและทิศทางของเป้าหมายที่เป็นเหล็กที่หมุนได้ และตัวเก็บประจุในตัวเพื่อให้แน่ใจว่าความเข้ากันได้ทางแม่เหล็กไฟฟ้า
บทสรุป
ตัวขับมอเตอร์ FOC BLDC แบบไร้เซ็นเซอร์ในตัว พร้อมด้วยเซ็นเซอร์ปัจจุบัน เซ็นเซอร์ตำแหน่งแม่เหล็ก และเซ็นเซอร์การหมุน เป็นส่วนประกอบหลักที่ช่วยให้ออกแบบ xEV ที่มีประสิทธิภาพและปลอดภัยด้วยระยะการขับขี่ที่มากขึ้นและลดการปล่อยก๊าซคาร์บอนไดออกไซด์ โดยเฉพาะอย่างยิ่ง การใช้มอเตอร์ไดรฟ์ FOC ช่วยให้สามารถออกแบบระบบระบายความร้อนที่มีประสิทธิภาพและเงียบขึ้นพร้อมการตอบสนองแบบไดนามิกที่ดีขึ้นสำหรับชุดแบตเตอรี่และอินเวอร์เตอร์ฉุด ในส่วนของเซ็นเซอร์นั้น เซ็นเซอร์ขนาดกะทัดรัด แม่นยำ และประหยัดพลังงานมีความสำคัญต่อการพัฒนา xEV ที่ตอบสนองความต้องการด้านความน่าเชื่อถือของระบบช่วยเหลือผู้ขับขี่ขั้นสูงและข้อกำหนดด้านความปลอดภัยในการใช้งานของ ISO 26262
บทความแนะนำ
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.