วิธีการใช้โมดูล GNSS แบบ Multi-Constellation ในการระบุตำแหน่งอย่างรวดเร็ว
Contributed By DigiKey's North American Editors
2021-09-09
การใช้ฟังก์ชันบอกตำแหน่งโดยใช้เครื่องรับระบบนำทางด้วยดาวเทียม (GNSS) แบบ Multi-Constellation สำหรับระบบนำทางกาลิเลโอ (Galileo) ของยุโรป, ระบบระบุตำแหน่งทั่วโลก (GPS) ของสหรัฐอเมริกา, ระบบ GLONASS ของรัสเซีย, ระบบดาวเทียมนำทาง BeiDou ของจีน และ QZSS ของญี่ปุ่นนั้นกำลังเติบโตในการใช้งานประเภทต่าง ๆ เช่น หุ่นยนต์ ยานยนต์อัตโนมัติ ระบบอัตโนมัติทางอุตสาหกรรม การขนส่งและการติดตามทรัพย์สิน โดรน และอุปกรณ์การเกษตรและการก่อสร้างหนัก ประโยชน์ของการใช้เครื่องรับ GNSS แบบ Multi-Constellation ได้แก่ ความพร้อมใช้งานที่ดีขึ้นของสัญญาณตำแหน่ง การนำทาง เวลา (PNT), ความแม่นยำและความสมบูรณ์ที่เพิ่มขึ้น และปรับปรุงความทนทานของแอปพลิเคชัน
แต่การพัฒนาเครื่องรับแบบ Multi-Constellation เป็นเรื่องที่ซับซ้อนและใช้เวลานาน ซึ่งรวมถึงการปรับเสาอากาศ L-band ให้เหมาะสมที่สุด, การออกแบบส่วนรับของความถี่วิทยุ (RF), การนำอัลกอริทึมการประมวลผลสัญญาณเบสแบนด์มาใช้งานเพื่อรับ ติดตาม และใช้การแก้ไขกับสัญญาณ PNT ต่าง ๆ, การเข้ารหัสซอฟต์แวร์ประมวลผลของแอปพลิเคชันเพื่อดึงข้อมูล PNT จากแต่ละช่องสัญญาณของเบสแบนด์ และใช้ข้อมูลดังกล่าวเพื่อนำฟังก์ชันของระบบไปใช้ นักออกแบบยังต้องเลือกเสาอากาศที่เหมาะสมและวางไว้ในตำแหน่งที่ถูกต้อง
อีกทางเลือกหนึ่งคือ นักออกแบบสามารถเปลี่ยนไปใช้โมดูล GNSS ที่ออกแบบไว้ล่วงหน้าและสภาพแวดล้อมสำหรับการพัฒนา เพื่อผสานรวมความสามารถในการระบุตำแหน่งเข้ากับระบบได้อย่างรวดเร็วและมีประสิทธิภาพ โดยโมดูล GNSS เหล่านี้ประกอบไปด้วยส่วนรับ RF, การประมวลผลเบสแบนด์ และเฟิร์มแวร์แบบฝัง เพื่อเพิ่มความเร็วให้กับการพัฒนาซอฟต์แวร์ในการประมวลผลแอปพลิเคชัน ซึ่งโมดูล GNSS บางโมดูลก็มีเสาอากาศด้วย
บทความนี้กล่าวถึงพื้นฐานของ GNSS, PNT และการทำงานของเครื่องรับ GNSS แบบ Multi-Constellation จากนั้นจะพิจารณาข้อดีและข้อเสียของการรวมเสาอากาศเข้ากับโมดูล GNSS ก่อนที่จะแนะนำโมดูล GNSS ทั้งที่มีและไม่มีเสาอากาศในตัว รวมทั้งบอร์ดประเมินผลที่เกี่ยวข้องจาก STMicroelectronics, Septentrioและ Würth Elektronik ที่นักออกแบบสามารถนำไปใช้ในการพัฒนาการใช้งานระบุตำแหน่งที่แม่นยำและคงทนได้อย่างมีประสิทธิภาพและคุ้มค่า
GNSS และ PNT คืออะไร
GNSS และ PNT เป็นแนวคิดที่เกี่ยวข้องกันอย่างแนบแน่น ดาวเทียม GNSS เป็นแหล่งสัญญาณ PNT ส่วนใหญ่ โดยหลักแล้วดาวเทียม GNSS เป็นนาฬิกาซิงโครไนซ์ที่มีความแม่นยำสูงและส่งข้อมูล PNT อย่างต่อเนื่อง โมดูล GNSS รับสัญญาณ PNT จากดาวเทียมที่กำหนดและคำนวณระยะทางจากดาวเทียมนั้น เมื่อเครื่องรับทราบระยะห่างของดาวเทียมอย่างน้อยสี่ดวง ก็จะสามารถคาดคะเนตำแหน่งของตัวมันเองได้ อย่างไรก็ตามความถูกต้องของการประมาณการณ์ตำแหน่งได้รับผลกระทบจากแหล่งที่มาของความคาดเคลื่อนต่าง ๆ ซึ่งรวมถึง:
- การดริฟท์ของนาฬิกาในวงจรบอกเวลาในดาวเทียม GNSS
- ความไม่ถูกต้องในการคาดการณ์ตำแหน่งวงโคจรที่แน่นอนของดาวเทียม GNSS
- การดริฟท์ของประสิทธิภาพทั่วไปในอุปกรณ์ดาวเทียมโดยรวมที่สัมพันธ์กับดาวเทียมดวงอื่น หรือที่เรียกว่าความเอนเอียงของดาวเทียม
- การบิดเบือนและความล่าช้าในการส่งสัญญาณเมื่อผ่านบรรยากาศชั้นไอโอโนสเฟียร์และโทรโพสเฟียร์
- การสะท้อนแบบหลายทางและประสิทธิภาพตัวแปรและการดริฟท์ในเครื่องรับ
มีเทคนิคต่าง ๆ สำหรับนักออกแบบในการแก้ไขความคาดเคลื่อน GNSS จากดาวเทียมและบรรยากาศ
ปรับปรุงประสิทธิภาพของ GNSS
วิธีที่ดีที่สุดในการลดผลกระทบของความคาดเคลื่อนที่เกิดขึ้นในเครื่องรับ GNSS คือการใช้เครื่องรับที่มีประสิทธิภาพสูงสุด ซึ่งเหมาะสมกับข้อจำกัดด้านต้นทุนและขนาดของการใช้งานที่กำหนด แต่แม้แต่เครื่องรับประสิทธิภาพสูงก็ยังไม่สมบูรณ์แบบ ซึ่งสามารถปรับปรุงประสิทธิภาพได้อีกมาก สิ่งสำคัญคือต้องเข้าใจวิธีการแก้ไขเหล่านี้ เนื่องจากวิธีการต่าง ๆ มีประสิทธิภาพที่แตกต่างกันและโมดูล GNSS บางโมดูลก็ไม่สามารถใช้วิธีการเหล่านี้ได้ทั้งหมด
สถานีอ้างอิงภาคพื้นดินใช้วิธีการแก้ไข GNSS หลายวิธี (รูปที่ 1) วิธีการที่กำหนดไว้มากที่สุดสำหรับการใช้สถานีอ้างอิงภาคพื้นดินในการแก้ไข GNSS ให้กับเครื่องรับ ได้แก่ Real-Time Kinematic (RTK) และ Precise Point Positioning (PPP) ไม่นานมานี้มีการใช้วิธี RTK-PPP แบบไฮบริด
 รูปที่ 1: เครื่องรับ GNSS ของผู้ใช้งานสามารถรับข้อมูลความคลาดเคลื่อนของบรรยากาศ นาฬิกา และวงโคจรจากเครือข่ายอ้างอิงเพื่อปรับปรุงความแม่นยำของการระบุตำแหน่ง (แหล่งที่มาภาพ: Septentrio)
รูปที่ 1: เครื่องรับ GNSS ของผู้ใช้งานสามารถรับข้อมูลความคลาดเคลื่อนของบรรยากาศ นาฬิกา และวงโคจรจากเครือข่ายอ้างอิงเพื่อปรับปรุงความแม่นยำของการระบุตำแหน่ง (แหล่งที่มาภาพ: Septentrio)
RTK อาศัยสถานีฐานเดี่ยวหรือเครือข่ายอ้างอิงในพื้นที่สำหรับข้อมูลการแก้ไขที่สามารถขจัดข้อผิดพลาด GNSS ส่วนใหญ่ได้ RTK ถือว่าสถานีฐานและเครื่องรับอยู่ใกล้กัน ห่างกันไม่เกิน 40 กิโลเมตร (กม.) หรือ 25 ไมล์ จึงพบข้อผิดพลาดเดียวกัน Post-Processed Kinematic หรือ PPK เป็นรูปแบบหนึ่งของ RTK และใช้กันอย่างแพร่หลายในการสำรวจและทำแผนที่ เพื่อให้ได้ข้อมูลตำแหน่งที่มีความแม่นยำสูงหรือความแม่นยำระดับเซนติเมตร
เฉพาะข้อผิดพลาดของวงโคจรและนาฬิกาดาวเทียมเท่านั้นที่ใช้วิธีการแก้ไขแบบ PPP โดยที่ข้อผิดพลาดที่เกี่ยวกับดาวเทียมเหล่านี้ไม่ขึ้นกับตำแหน่งของผู้ใช้ ซึ่งจำกัดจำนวนสถานีอ้างอิงที่จำเป็น อย่างไรก็ตาม PPP ไม่ได้คำนึงถึงข้อผิดพลาดที่เกี่ยวกับบรรยากาศ ดังนั้นจึงมีความแม่นยำต่ำกว่าเมื่อเทียบกับ RTK นอกจากนั้นการแก้ไขแบบ PPP อาจใช้เวลาเริ่มต้นประมาณ 20 นาที เวลาเริ่มต้นที่นานขึ้นและความแม่นยำที่ต่ำลงทำให้ PPP ไม่เหมาะกับการใช้งานหลายประเภท
การใช้งานที่ต้องการความแม่นยำใกล้กับ RTK และเวลาเริ่มต้นอย่างรวดเร็วมักใช้การแก้ไข GNSS ใหม่ล่าสุด คือวิธี RTK-PPP (บางครั้งเรียกว่าการจำลองค่าความคลาดเคลื่อนโดยจำแนกชนิด (SSR)) ใช้เครือข่ายอ้างอิงที่มีสถานีห่างกันประมาณ 100 กม. (65 ไมล์) ซึ่งรวบรวมข้อมูล GNSS และคำนวณการรวมการแก้ไขด้านดาวเทียมและด้านบรรยากาศ เครือข่ายอ้างอิงใช้เครือข่ายอินเทอร์เน็ต ดาวเทียม หรือโทรศัพท์มือถือ เพื่อส่งข้อมูลการแก้ไขไปยังสมาชิก เครื่องรับ GNSS ที่ใช้วิธี RTK-PPP สามารถมีความแม่นยำในระดับน้อยกว่าเดซิมิเตอร์ได้ ทางเลือกในการใช้วิธีแก้ไข RTK, PPP และ RTK-PPP นั้นเกี่ยวข้องกับชุดประเด็นที่ต้องพิจารณาในการออกแบบที่นักพัฒนาซอฟต์แวร์จำเป็นต้องตรวจสอบ เพื่อเลือกโซลูชันที่เหมาะสมที่สุดสำหรับรูปแบบการใช้งานเฉพาะ (รูปที่ 2)
 รูปที่ 2: จุดแข็งและจุดอ่อนของวิธีการแก้ไข GNSS ทั่วไปสามวิธี (แหล่งที่มาภาพ: Septentrio)
รูปที่ 2: จุดแข็งและจุดอ่อนของวิธีการแก้ไข GNSS ทั่วไปสามวิธี (แหล่งที่มาภาพ: Septentrio)
ระบบเสริมด้วยดาวเทียม (Satellite-based augmentation systems, SBAS) เริ่มให้บริการในระดับภูมิภาคเพื่อแทนที่วิธีการแก้ไขตามสถานีภาคพื้นดิน RTK, PPP และ RTK-PPP SBAS ยังคงใช้สถานีภาคพื้นดินเพื่อประเมินข้อผิดพลาดของ GNSS แต่สถานีเหล่านั้นจะกระจายไปทั่วทั้งทวีป ข้อผิดพลาดจากการประเมินจะถูกประมวลผลที่ตำแหน่งศูนย์กลางซึ่งจะมีการคำนวณการแก้ไขและส่งไปยังดาวเทียมพ้องคาบโลก (Geosynchronous Satellite) เหนือพื้นที่ที่ครอบคลุม ข้อมูลการแก้ไขจะออกจากดาวเทียมเป็นการซ้อนทับหรือเสริมไปยังข้อมูล GNSS ดั้งเดิม
ความแม่นยำของ GNSS ขึ้นอยู่กับความพร้อมใช้งานและความแม่นยำของการวัดด้วยดาวเทียมและการแก้ไขที่เกี่ยวข้อง เครื่องรับ GNSS ประสิทธิภาพสูงติดตามสัญญาณ GNSS หลายความถี่ และใช้ GNSS แบบ Multiple Constellation และวิธีการแก้ไขต่าง ๆ เพื่อส่งมอบความแม่นยำและความยืดหยุ่นที่จำเป็น ความซ้ำซ้อนที่เป็นผลลัพธ์ช่วยให้ทำงานได้อย่างเสถียร แม้ว่าการวัดด้วยดาวเทียมและข้อมูลบางส่วนจะมีสัญญาณรบกวน นักออกแบบสามารถเลือกความแม่นยำและความซ้ำซ้อนของ GNSS ได้หลากหลาย (รูปที่ 3)
 รูปที่ 3: ระดับความแม่นยำของ GNSS พร้อมวิธีการแก้ไขที่สอดคล้องกันและการใช้งานที่เลือก (แหล่งที่มาภาพ: Septentrio)
รูปที่ 3: ระดับความแม่นยำของ GNSS พร้อมวิธีการแก้ไขที่สอดคล้องกันและการใช้งานที่เลือก (แหล่งที่มาภาพ: Septentrio)
โมดูล GNSS: แบบรวมเสาอากาศ vs แบบมีเสาอากาศภายนอก
เนื่องจากความซับซ้อนของการระบุตำแหน่งแบบ Multi-constellation จึงทำให้มีโมดูลจากซัพพลายเออร์หลายรายที่ช่วยเร่งเวลาออกสู่ตลาด ลดต้นทุน และรับประกันประสิทธิภาพ ที่กล่าวว่านักออกแบบจำเป็นต้องพิจารณาว่าจะใช้เสาอากาศภายในหรือเลือกใช้เสาอากาศที่อยู่ภายนอกโมดูล GNSS แทน สำหรับการใช้งานที่ให้ความสำคัญกับเวลาในการออกสู่ตลาดและต้นทุน เสาอากาศในตัวอาจเหมาะสมกว่า เนื่องจากต้องอาศัยขั้นตอนทางวิศวกรรมน้อยกว่ามาก สำหรับการใช้งานที่ต้องการการรับรอง FCC หรือ CE การใช้โมดูลที่มีเสาอากาศในตัวยังช่วยให้กระบวนการอนุมัติเร็วขึ้นอีกด้วย อย่างไรก็ตาม ขนาดของโซลูชันสามารถเพิ่มขึ้น และความยืดหยุ่นอาจถูกจำกัดด้วยโซลูชันเสาอากาศในตัว
เสาอากาศภายนอกช่วยให้นักออกแบบมีตัวเลือกด้านประสิทธิภาพและเค้าโครงที่กว้างขึ้น สามารถเลือกเสาอากาศประสิทธิภาพสูงขนาดใหญ่หรือเสาอากาศขนาดเล็กที่มีประสิทธิภาพต่ำกว่าได้ นอกจากนี้ การจัดวางเสาอากาศยังมีความยืดหยุ่นมากขึ้นเมื่อเทียบกับตำแหน่งของโมดูล GNSS ซึ่งช่วยเพิ่มความยืดหยุ่นในการออกแบบอีกด้วย ความยืดหยุ่นในการจัดวางยังช่วยให้เสาอากาศภายนอกสามารถทำงาน GNSS ได้อย่างน่าเชื่อถือมากขึ้น อย่างไรก็ตาม การวางตำแหน่งเสาอากาศและการกำหนดเส้นทางการเชื่อมต่ออาจเป็นกระบวนการที่ซับซ้อนและใช้เวลานาน และต้องใช้ความเชี่ยวชาญเฉพาะด้าน ซึ่งอาจเพิ่มต้นทุนและทำให้เวลาในการออกสู่ตลาดช้าลง
โมดูล GNSS ขนาดเล็กสำหรับการออกแบบที่มีพื้นที่จำกัด
ทีมออกแบบที่มีความเชี่ยวชาญในการวางเสาอากาศและการกำหนดเส้นทางสามารถใช้ Teseo-LIV3Fของ STMicroelectronics โมดูล GNSS แบบ Multi-constellation (GPS/Galileo/GLONASS/BeiDou/QZSS) ที่ใช้เสาอากาศภายนอก (รูปที่ 4) โมดูลมาในแพ็คเกจ LCC-18 ขนาด 9.7 มม. x 10.1 มม. และมีความแม่นยำของตำแหน่งความคลาดเคลื่อนน่าจะเป็น (CEP) 1.5 เมตร (ม.) พร้อมเวลาในการแก้ไขครั้งแรก (TTFF) สำหรับการเริ่มใช้งานหลังจากหยุดใช้งาน (Cold Start) และเริ่มใช้งานหลังจากหยุดพักระยะสั้น (Hor Start) ใช้เวลาต่ำที่สุด 32 วินาที และต่ำกว่า 1.5 วินาที ตามลำดับ (GPS, GLONASS) มีการใช้พลังงานสแตนด์บาย 17 ไมโครวัตต์ (µW) และการใช้พลังงานในการติดตามที่ 75 มิลลิวัตต์ (mW)
 รูปที่ 4: โมดูล GNSS ของ Tesco-LIV3F ประกอบด้วยแกนหลักและระบบย่อยของ GNSS รวมถึงการเชื่อมต่อและการจัดการพลังงานที่จำเป็นทั้งหมดในแพ็คเกจขนาด 9.7 x 10.1 มม. ต้องใช้เสาอากาศภายนอก (แหล่งที่มาภาพ: STMicroelectronics)
รูปที่ 4: โมดูล GNSS ของ Tesco-LIV3F ประกอบด้วยแกนหลักและระบบย่อยของ GNSS รวมถึงการเชื่อมต่อและการจัดการพลังงานที่จำเป็นทั้งหมดในแพ็คเกจขนาด 9.7 x 10.1 มม. ต้องใช้เสาอากาศภายนอก (แหล่งที่มาภาพ: STMicroelectronics)
ออสซิลเลเตอร์คริสตัลชดเชยอุณหภูมิ (TCXO) 26 เมกะเฮิรตซ์ (MHz) ออนบอร์ดของ Tesco-LIV3F ช่วยให้มั่นใจได้ถึงความแม่นยำสูง และออสซิลเลเตอร์นาฬิกาเรียลไทม์ (RTC) ขนาด 32 กิโลเฮิรตซ์ (kHz) เฉพาะช่วยลดเวลาในการแก้ไขครั้งแรก (TTFF) คุณสมบัติต่าง ๆ เช่น การบันทึกข้อมูล, GNSS ช่วยเหลืออัตโนมัติเจ็ดวัน, การกำหนดค่าเฟิร์มแวร์ (FW) ใหม่ รวมถึงการอัปเกรด FW นั้นเปิดใช้งานโดยหน่วยความจำแฟลชแบบฝัง 16 เมกะบิต (Mbit)
การใช้งานที่เหมาะสมสำหรับ Tesco-LIV3F ได้แก่ การประกันภัย การขนส่ง โดรน การเก็บค่าผ่านทาง ระบบป้องกันการโจรกรรม ตำแหน่งคนและสัตว์เลี้ยง การติดตามยานพาหนะ และการโทรฉุกเฉิน
ในฐานะโซลูชันที่ได้รับการรับรองล่วงหน้า การใช้โมดูล Teseo-LIV3F อาจส่งผลให้ใช้เวลาในการออกสู่ตลาดสำหรับการใช้งานขั้นสุดท้ายลดลง มีช่วงอุณหภูมิในการทำงาน -40°C ถึง +85°C
ในการทดลองกับโมดูลและเร่งการพัฒนาแอปพลิเคชัน นักออกแบบสามารถใช้บอร์ดประเมินผล AEK-COM-GNSST31 เมื่อใช้ร่วมกับเฟิร์มแวร์ X-CUBE-GNSS1 แพ็คเกจการประเมินผลสามารถรองรับคำนวณตำแหน่ง การติดตาม การนำทาง และการส่งข้อมูลออกโดยไม่ต้องใช้หน่วยความจำภายนอก EVB นี้ยังได้รับการออกแบบสำหรับใช้กับไมโครคอนโทรลเลอร์ SPC5 สำหรับการพัฒนาการใช้งานในยานยนต์
โมดูล GNSS พร้อมการลดสัญญาณรบกวน
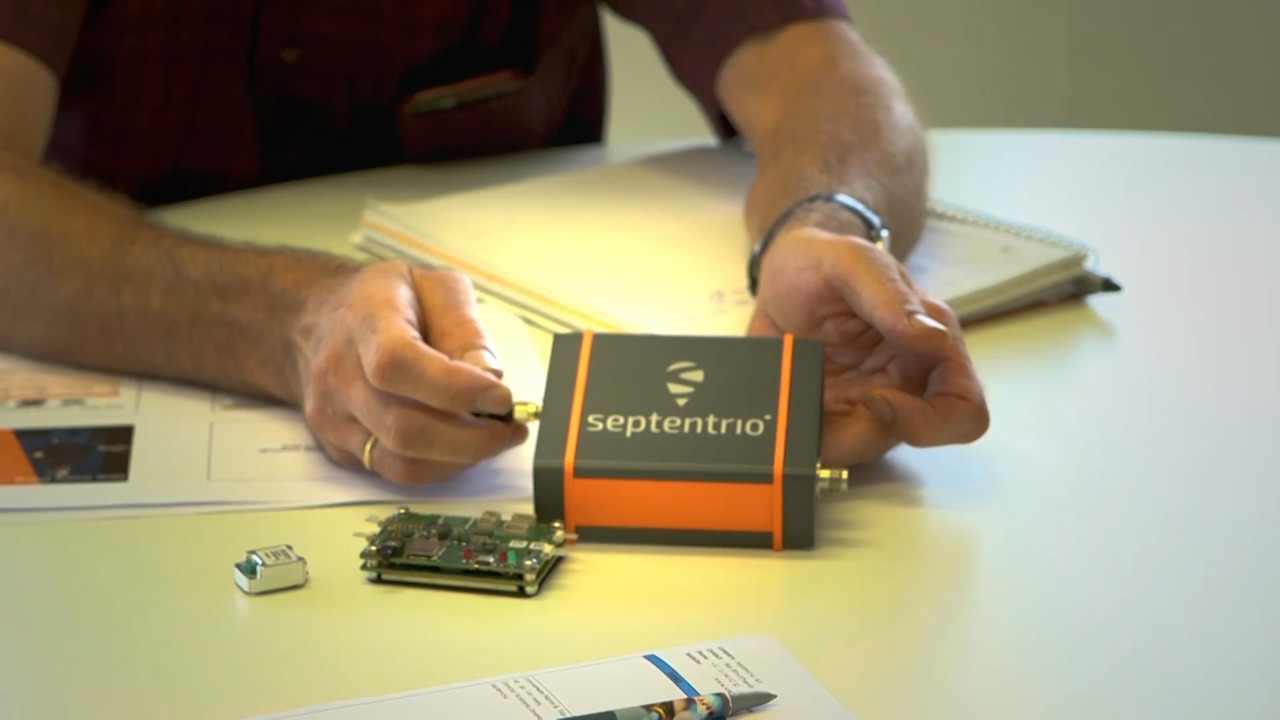
เครื่องรับGNSS แบบ Multi-constellation รุ่น 410322 mosaic-X5 ของ Septentrio เป็นโมดูลแบบติดตั้งบนพื้นผิวที่ใช้พลังงานต่ำ โดยวัดได้ 31 มม. x 31 มม. x 4 มม. ที่ให้นักออกแบบมีอาร์เรย์ของอินเทอร์เฟซ รวมถึง UART สี่ตัว, อีเทอร์เน็ต, USB, SDIO และพอร์ต GPIO ที่ตั้งโปรแกรมได้ 2 พอร์ต
ออกแบบมาเพื่อใช้ในหุ่นยนต์ ระบบอัตโนมัติ และการใช้งานในตลาดมวลชนอื่น ๆ Mosaic-X5 มีอัตราการอัปเดต 100 เฮิรตซ์ (Hz) เวลาแฝงต่ำกว่า 10 มิลลิวินาที (มิลลิวินาที) และความแม่นยำในการวางตำแหน่ง RTK ในแนวตั้งและแนวนอนของ 0.6 ซม. และ 1 ซม. ตามลำดับ สามารถติดตามกลุ่มดาว GNSS ทั้งหมด รองรับสัญญาณปัจจุบันและอนาคต และเข้ากันได้กับการแก้ไข PPP, SSR, RTK และ SBAS โดย TTFF ของโมดูลในการเริ่มใช้งานหลังจากหยุดใช้งาน (Cold Start) ต่ำกว่า 45 วินาทีและเริ่มใช้งานหลังจากหยุดพักระยะสั้น (Warm Start) ต่ำกว่า 20 วินาที
Mosaic-X5 มีเทคโนโลยีที่จดสิทธิบัตรโดย Septentrio หลายตัว ซึ่งรวมถึง AIM+ ซึ่งเป็นเทคโนโลยีลดการรบกวนแบบออนบอร์ดที่ระงับสัญญาณรบกวนที่หลากหลาย ตั้งแต่สัญญาณย่านความถี่แคบแบบต่อเนื่องแบบธรรมดาไปจนถึงย่านความถี่กว้างแบบซับซ้อนและสัญญาณรบกวนแบบพัลซิ่ง
อินเทอร์เฟซ คำสั่ง และข้อความข้อมูลของโมดูลได้รับการจัดทำเป็นเอกสารอย่างสมบูรณ์ ซอฟต์แวร์ RxTools ที่รวมไว้ช่วยให้สามารถกำหนดค่าและตรวจสอบเครื่องรับ รวมถึงการบันทึกข้อมูลและการวิเคราะห์
ชุดพัฒนา 410331P3161 mosaic-X5 ของ Septentrio ช่วยให้นักออกแบบสามารถสำรวจ ประเมิน และพัฒนาต้นแบบที่ใช้ประโยชน์จากความสามารถของ mosaic-X5 อย่างเต็มที่ (ภาพที่ 5)
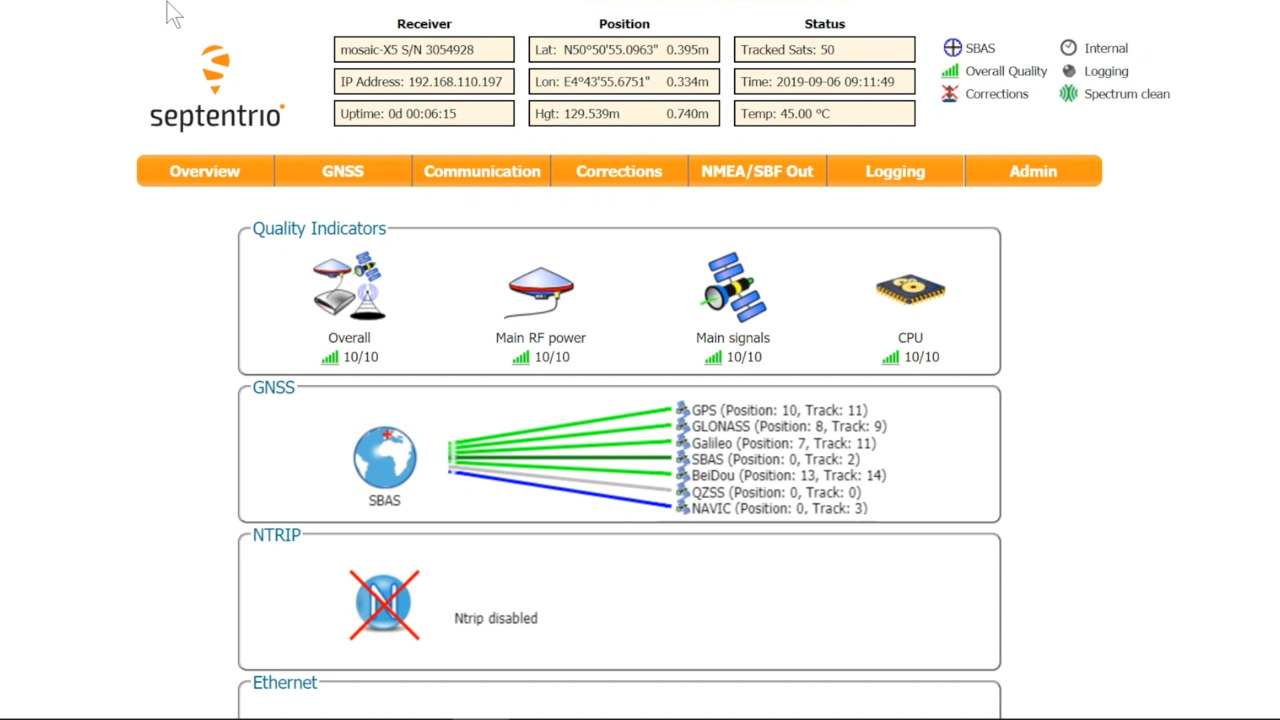
 รูปที่ 5: นักออกแบบสามารถสร้างต้นแบบได้โดยใช้ชุดพัฒนา 410331P3161 mosaic-X5 โดยใช้การเชื่อมต่อที่หลากหลาย รวมถึง Ethernet, พอร์ต COM หรือ USB 2.0 หรือโดยใช้การ์ดหน่วยความจำ SD (แหล่งที่มาภาพ: Septentrio)
รูปที่ 5: นักออกแบบสามารถสร้างต้นแบบได้โดยใช้ชุดพัฒนา 410331P3161 mosaic-X5 โดยใช้การเชื่อมต่อที่หลากหลาย รวมถึง Ethernet, พอร์ต COM หรือ USB 2.0 หรือโดยใช้การ์ดหน่วยความจำ SD (แหล่งที่มาภาพ: Septentrio)
ชุดนี้ใช้ส่วนต่อประสานผู้ใช้เว็บที่ใช้งานง่ายของ mosaic-X5 เพื่อความสะดวกในการใช้งานและการตรวจสอบ ช่วยให้นักออกแบบสามารถควบคุมโมดูลรับสัญญาณจากอุปกรณ์เคลื่อนที่หรือคอมพิวเตอร์เครื่องใดก็ได้ เว็บอินเตอร์เฟสใช้ตัวบ่งชี้คุณภาพที่อ่านง่ายเพื่อตรวจสอบการทำงานของเครื่องรับ
นักออกแบบสามารถสร้างต้นแบบได้โดยการผสานรวมโมเสก dev-kit โดยใช้การเชื่อมต่อใด ๆ ต่อไปนี้: อีเธอร์เน็ต, พอร์ต COM, USB 2.0, การ์ดหน่วยความจำ SD
โมดูล GNSS พร้อมเสาอากาศในตัว
สำหรับผู้ออกแบบแอพพลิเคชั่นที่สามารถได้รับประโยชน์จากการใช้โมดูล GNSS ที่มีเสาอากาศในตัว Würth Elektronik ขอเสนอโมดูล 2614011037000 Erinome-I พร้อมระบบบนชิปประสิทธิภาพสูง (SoC) (รูปที่ 6) โมดูลนี้รองรับกลุ่มดาวเทียม GPS, GLONASS, Galileo และ BeiDou GNSS และมาพร้อมกับเสาอากาศในตัวที่ด้านบนซึ่งช่วยลดความยุ่งยากในการรวมฮาร์ดแวร์และย่นระยะเวลาออกสู่ตลาด โมดูลรวมทั้งเสาอากาศในตัว ขนาด 18 มม. x 18 มม.
 รูปที่ 6: 2614011037000 Erinome-I เป็นโมดูล GNSS ที่สมบูรณ์พร้อม GNSS SoC ประสิทธิภาพสูงพร้อมเสาอากาศในตัว (แหล่งที่มาภาพ: Würth Elektronik)
รูปที่ 6: 2614011037000 Erinome-I เป็นโมดูล GNSS ที่สมบูรณ์พร้อม GNSS SoC ประสิทธิภาพสูงพร้อมเสาอากาศในตัว (แหล่งที่มาภาพ: Würth Elektronik)
นอกจากนี้ยังมีโมดูล TCXO, ฟิลเตอร์ RF, แอมพลิฟายเออร์สัญญาณรบกวนต่ำ (LNA) และหน่วยความจำแฟลชแบบอนุกรม
Würth ยังมีบอร์ดประเมินผล (EVB) 2614019037001 สำหรับ Erinome-I (รูปที่ 7) EVB ยังสามารถใช้เป็นแบบอ้างอิงสำหรับการรวมโมดูล GNSS ในแอปพลิเคชันได้อีกด้วย สามารถใช้พอร์ต USB เพื่อเชื่อมต่อ EVB กับพีซี ตัวเชื่อมต่อแบบหลายพินช่วยให้นักออกแบบสามารถเข้าถึงพินทั้งหมดของโมดูล GNSS
 รูปที่ 7: บอร์ดประเมินผล 2614019037001 สำหรับ Erinome-I (ใกล้กับศูนย์กลางของบอร์ด โดยมีเสาอากาศในตัวที่มองเห็นได้ตรงกลางของโมดูล) ยังทำหน้าที่เป็นแบบอ้างอิง (แหล่งที่มาภาพ: Würth Elektronik)
รูปที่ 7: บอร์ดประเมินผล 2614019037001 สำหรับ Erinome-I (ใกล้กับศูนย์กลางของบอร์ด โดยมีเสาอากาศในตัวที่มองเห็นได้ตรงกลางของโมดูล) ยังทำหน้าที่เป็นแบบอ้างอิง (แหล่งที่มาภาพ: Würth Elektronik)
ซอฟต์แวร์การนำทางและดาวเทียม Würth Elektronik (WENSS) เป็นเครื่องมือ PC อย่างง่ายในการโต้ตอบกับโมดูล Erinome-I GNSS โดยใช้อินเทอร์เฟซ UART รองรับ:
- ควบคุมการทำงานของ EVB
- การสื่อสารแบบสองทิศทางด้วยโมดูล Erinome-I
- การประเมินคุณสมบัติและความสามารถของ Erinome-I
- ทำความคุ้นเคยกับโปรโตคอล ประโยค และคำสั่งของ Erinome-I
- การกำหนดค่าของ Erinome-I โดยปราศจากความรู้เกี่ยวกับโปรโตคอล
- การแยกประโยคและคำสั่งที่ใช้โดย Erinome-I
WENSS ช่วยให้ประเมินการใช้งานในการกำหนดตำแหน่งได้ง่ายโดยไม่ต้องมีความรู้ขั้นสูง นักพัฒนาที่มีประสบการณ์ยังสามารถใช้ WENSS สำหรับการกำหนดค่าขั้นสูงเพิ่มเติม
สรุป
ความสามารถในการระบุตำแหน่งที่แม่นยำและเชื่อถือได้ทำได้ดีที่สุดโดยใช้กลุ่มดาวเทียมหลายกลุ่มพร้อมการสนับสนุนเทคโนโลยีการแก้ไขที่เกี่ยวข้อง ระบบเหล่านี้เป็นระบบที่ซับซ้อน แต่นักออกแบบสามารถเปลี่ยนไปใช้โมดูล GNSS ที่ออกแบบไว้ล่วงหน้า ชุดพัฒนาที่เกี่ยวข้อง และสภาพแวดล้อมเพื่อเปรียบเทียบตัวเลือกอย่างรวดเร็วและมีประสิทธิภาพ และใช้คุณสมบัติและบริการตามตำแหน่ง
บทความแนะนำ
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.