วิธีเริ่มต้นการออกแบบการควบคุมมอเตอร์กระแสตรงไร้แปรงถ่านอย่างรวดเร็วโดยใช้ไอซีแบบบูรณาการสูง
Contributed By DigiKey's North American Editors
2021-11-02
เนื่องจากการเปลี่ยนแปลงอย่างรวดเร็วไปสู่การควบคุมอิเล็กทรอนิกส์ของระบบกลไก ซึ่งขับเคลื่อนโดย Internet of Things (IoT) ส่วนใหญ่และการใช้พลังงานไฟฟ้าของรถยนต์ นักออกแบบจึงใช้มอเตอร์กำลังต่ำกับงานพื้นฐานในการใช้งานตั้งแต่เครื่องใช้ในบ้าน ล็อคประตู และมู่ลี่ควบคุมด้วยรีโมท ไปจนถึงปั๊มรถยนต์ ที่นั่ง หน้าต่าง และประตู มอเตอร์กระแสตรงเหล่านี้ ซึ่งมีตั้งแต่ขนาดเล็ก เศษส่วนไปจนถึงหลายแรงม้า มีอยู่ทั่วไปทุกหนทุกแห่งแต่มักมองไม่เห็น
ในขณะที่การปรับปรุงมอเตอร์ ตลอดจนเทคโนโลยีการควบคุมมอเตอร์ที่ดีขึ้นและง่ายต่อการใช้งาน กำลังช่วยให้มีการขยายตัวอย่างรวดเร็วนี้ นักออกแบบยังคงอยู่ภายใต้แรงกดดันอย่างต่อเนื่องในการปรับปรุงประสิทธิภาพและต้นทุนที่ต่ำลง ในขณะที่ยังได้รับความแม่นยำและความน่าเชื่อถือที่สูงขึ้นอีกด้วย
ความผันแปรของมอเตอร์ DC แบบไม่มีแปรงถ่าน (BLDC) และสเต็ปเปอร์มอเตอร์ (มอเตอร์กระแสตรงไร้แปรงถ่านอีกประเภทหนึ่ง) สามารถช่วยให้นักออกแบบสามารถตอบสนองความต้องการด้านประสิทธิภาพและวัตถุประสงค์ด้านต้นทุนที่เพิ่มขึ้นเหล่านี้ได้ แต่ต้องคำนึงถึงตัวควบคุมมอเตอร์และวงจรขับมอเตอร์อย่างระมัดระวังเท่านั้น ตัวควบคุมต้องส่งสัญญาณไดรฟ์ที่เหมาะสมไปยังสวิตช์ไดรฟ์อิเล็กทรอนิกส์ของมอเตอร์ (โดยปกติคือ MOSFET) และดำเนินการดังกล่าวด้วยการควบคุมเวลาและระยะเวลาอย่างระมัดระวัง นอกจากนี้ยังต้องควบคุมวิถีทางลาดขึ้น/ลงของมอเตอร์ ตลอดจนตรวจจับและปรับให้เข้ากับปัญหาด้านอ่อนที่หลีกเลี่ยงไม่ได้และความล้มเหลวอย่างหนักของมอเตอร์หรือโหลด
บทความนี้กล่าวถึงฟังก์ชันที่ไอซีควบคุมสำหรับมอเตอร์ BLDC มีให้ ให้มุมมองโดยรวมเกี่ยวกับคุณลักษณะทางไฟฟ้าของมอเตอร์ BLDC และอธิบายว่าตัวควบคุมที่ซับซ้อนช่วยให้มอเตอร์ BLDC สามารถบรรลุวัตถุประสงค์ของแอปพลิเคชันโดยใช้ซีรี่ส์ไอซีควบคุมมอเตอร์จาก RenesasRAJ306010
เส้นทางการควบคุมมอเตอร์และมอเตอร์
เส้นทางจากซอฟต์แวร์ควบคุมการเคลื่อนไหวไปยังมอเตอร์ประกอบด้วยโปรเซสเซอร์ที่ซอฟต์แวร์ทำงาน ไดรเวอร์เกทสำหรับอุปกรณ์สวิตช์ไฟของมอเตอร์ และมอเตอร์ (รูปที่ 1) อาจมีเส้นทางจากเซ็นเซอร์ที่มอเตอร์กลับไปยังโปรเซสเซอร์ผ่านทางส่วนหน้าแบบแอนะล็อก โดยให้ข้อมูลเกี่ยวกับตำแหน่งหรือความเร็วของโรเตอร์ของมอเตอร์เพื่อยืนยันประสิทธิภาพและปิดวงจรป้อนกลับ
") รูปที่ 1: การควบคุมมอเตอร์ของวันนี้เริ่มต้นด้วยซอฟต์แวร์ที่ฝังเป็นเฟิร์มแวร์ในโปรเซสเซอร์ที่ควบคุมไดรเวอร์เกท ซึ่งในทางกลับกัน จะสลับพลังงานไปที่ขดลวดของมอเตอร์ อาจมีลูปป้อนกลับที่ขับเคลื่อนด้วยเซ็นเซอร์จากมอเตอร์กลับไปยังโปรเซสเซอร์ (แหล่งรูปภาพ: Renesas)
รูปที่ 1: การควบคุมมอเตอร์ของวันนี้เริ่มต้นด้วยซอฟต์แวร์ที่ฝังเป็นเฟิร์มแวร์ในโปรเซสเซอร์ที่ควบคุมไดรเวอร์เกท ซึ่งในทางกลับกัน จะสลับพลังงานไปที่ขดลวดของมอเตอร์ อาจมีลูปป้อนกลับที่ขับเคลื่อนด้วยเซ็นเซอร์จากมอเตอร์กลับไปยังโปรเซสเซอร์ (แหล่งรูปภาพ: Renesas)
นักออกแบบมีตัวเลือกชั้นนำสองตัวเลือกสำหรับมอเตอร์ไร้แปรงถ่านที่ขับเคลื่อนด้วย DC ได้แก่ มอเตอร์ BLDC และสเต็ปเปอร์มอเตอร์ ทั้งสองทำงานเนื่องจากปฏิสัมพันธ์ทางแม่เหล็กระหว่างแม่เหล็กถาวรภายในและการสลับของขดลวดแม่เหล็กไฟฟ้า ทางเลือกของสองสิ่งนี้ที่จะใช้นั้นพิจารณาจากข้อดีและข้อเสียที่สัมพันธ์กับการใช้งานที่ตั้งใจไว้
โดยทั่วไปแล้ว มอเตอร์ BLDC มีความน่าเชื่อถือสูง มีประสิทธิภาพ และสามารถให้แรงบิดจำนวนมากในช่วงความเร็วต่าง ๆ ขั้วของมอเตอร์สเตเตอร์ได้รับพลังงานตามลำดับ ซึ่งทำให้โรเตอร์ (ที่มีแม่เหล็กถาวร) หมุน โดยทั่วไปแล้วมอเตอร์ BLDC จะมีสเตเตอร์ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์สามสเตเตอร์รอบนอก (รูปที่ 2)
 รูปที่ 2: สเตเตอร์ของมอเตอร์ BLDC ได้รับพลังงานตามลำดับเพื่อให้โรเตอร์แม่เหล็กถาวรหมุน (แหล่งรูปภาพ: Renesas)
รูปที่ 2: สเตเตอร์ของมอเตอร์ BLDC ได้รับพลังงานตามลำดับเพื่อให้โรเตอร์แม่เหล็กถาวรหมุน (แหล่งรูปภาพ: Renesas)
คุณลักษณะสำคัญของมอเตอร์ BLDC ได้แก่ การตอบสนอง การเร่งความเร็วที่รวดเร็ว ความน่าเชื่อถือ อายุการใช้งานยาวนาน การทำงานที่ความเร็วสูง และความหนาแน่นของพลังงานสูง มักเป็นตัวเลือกในการใช้งาน เช่น อุปกรณ์ทางการแพทย์ พัดลมระบายความร้อน เครื่องมือไฟฟ้าไร้สาย แท่นหมุน และอุปกรณ์อัตโนมัติ
สเต็ปเปอร์มอเตอร์ ทำงานคล้ายกับมอเตอร์ BLDC ยกเว้นว่ามันเคลื่อนที่ในการเคลื่อนที่แบบหมุนที่เล็กกว่ามากโดยแบ่งการหมุนแบบเต็มเป็นขั้นบันไดที่มีมุมเท่ากันจำนวนมาก (โดยทั่วไปคือ 128 หรือ 256) แทนที่จะหมุนอย่างต่อเนื่อง โรเตอร์ของมอเตอร์จะถูกขับเคลื่อนตามลำดับเพื่อเดินหรือก้าวผ่านขั้นบันไดมุมเล็ก ๆ เหล่านั้น (รูปที่ 3) ช่วยให้วางโรเตอร์ได้อย่างแม่นยำในขณะที่ซิงโครไนซ์กับสนามแม่เหล็กที่เกิดจากเสาสเตเตอร์ที่มีพลังงาน
 รูปที่ 3: การเคลื่อนที่แบบสเต็ปมีเสาสเตเตอร์จำนวนมากที่จัดเรียงรอบโรเตอร์และแม่เหล็กถาวร โดยการเพิ่มพลังให้เสาเหล่านี้ในลำดับที่ควบคุม โรเตอร์จะหมุนและก้าวผ่านมุมเล็ก ๆ (แหล่งรูปภาพ: Renesas)
รูปที่ 3: การเคลื่อนที่แบบสเต็ปมีเสาสเตเตอร์จำนวนมากที่จัดเรียงรอบโรเตอร์และแม่เหล็กถาวร โดยการเพิ่มพลังให้เสาเหล่านี้ในลำดับที่ควบคุม โรเตอร์จะหมุนและก้าวผ่านมุมเล็ก ๆ (แหล่งรูปภาพ: Renesas)
สเต็ปเปอร์มอเตอร์มีความน่าเชื่อถือ แม่นยำ และให้อัตราเร่งและการตอบสนองที่รวดเร็ว เนื่องจากการทำงานแบบสเต็ปปิ้งและการสร้างมอเตอร์ การควบคุมแบบวงเปิดและความเสถียรของตำแหน่งจึงมักจะเพียงพอแม้สำหรับการใช้งานที่มีความแม่นยำ เช่น ไดรฟ์ซีดี สแกนเนอร์แบบแท่น เครื่องพิมพ์ และพล็อตเตอร์ แอปพลิเคชันขั้นสูงอาจเพิ่มเซ็นเซอร์ป้อนกลับและการควบคุมแบบวงปิดเพื่อเพิ่มความแม่นยำและการยืนยันประสิทธิภาพ
ตัวเลือกการควบคุมมอเตอร์ BLDC
ต่างจากมอเตอร์ไฟฟ้ากระแสสลับแบบเหนี่ยวนำกระแสสลับหรือแบบแปรงถ่าน ซึ่งวิธีการหลักในการควบคุมความเร็วและแรงบิดคือการปรับแรงดันไฟฟ้าของแหล่งจ่าย มอเตอร์ BLDC จะถูกควบคุมโดยกำหนดเวลาอย่างระมัดระวังในการเปิดและปิดของ MOSFET ที่สลับกำลัง ซึ่งช่วยให้มอเตอร์สามารถจัดการงานที่หลากหลายได้อย่างมีประสิทธิภาพและแม่นยำ
ข้อกำหนดเหล่านี้อาจมีตั้งแต่การให้รอบต่อนาทีสูง (RPM) ที่จำเป็นในการเคลื่อนย้ายอากาศจำนวนมากเพื่อให้ดูดในสุญญากาศไร้สาย ไปจนถึงเครื่องมือไฟฟ้าที่ต้องมีแรงบิดในการสตาร์ทเครื่องสูง โดยเฉพาะอย่างยิ่งหากมอเตอร์หยุดนิ่งกับโหลด ในการใช้งานหลายอย่าง มอเตอร์จะต้องสามารถจัดการกับการเปลี่ยนแปลงของโหลดขนาดใหญ่ ซึ่งต้องการเวลาตอบสนองที่รวดเร็วเพื่อรักษา RPM ที่สม่ำเสมอ
มีกลยุทธ์ทั่วไปในการควบคุมมอเตอร์ BLDC: การควบคุมเปิด/ปิดพื้นฐาน 120⁰ และการควบคุมเวกเตอร์ ในการควบคุมการเปิด/ปิด 120⁰ ขดลวดสองในสามของมอเตอร์ BLDC จะได้รับพลังงาน และรูปแบบการจ่ายพลังงานหกรูปแบบจะถูกสลับตามลำดับการหมุนเพื่อรองรับการหมุนในทิศทางใดทิศทางหนึ่ง (รูปที่ 4)
") รูปที่ 4: เสาสเตเตอร์ของมอเตอร์ BLDC (ซ้าย) สามารถให้พลังงานในลำดับตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา (ขวา) ได้ ดังนั้นการขับเคลื่อนโรเตอร์ไปในทิศทางใดทิศทางหนึ่งตามที่แอปพลิเคชันกำหนด (แหล่งรูปภาพ: Renesas)
รูปที่ 4: เสาสเตเตอร์ของมอเตอร์ BLDC (ซ้าย) สามารถให้พลังงานในลำดับตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา (ขวา) ได้ ดังนั้นการขับเคลื่อนโรเตอร์ไปในทิศทางใดทิศทางหนึ่งตามที่แอปพลิเคชันกำหนด (แหล่งรูปภาพ: Renesas)
ในโหมดนี้ ขดลวดสเตเตอร์จะได้รับพลังงานจากกระแสเปิด/ปิด (คลื่นสี่เหลี่ยม) ส่งผลให้เกิดโปรไฟล์การเร่งความเร็วรูปสี่เหลี่ยมคางหมูเมื่อมอเตอร์เร่งความเร็ว รักษาความเร็ว และจากนั้นจะลดความเร็วลงเมื่อขดลวดหมดฤทธิ์ ประโยชน์ของวิธีนี้คือความเรียบง่ายโดยธรรมชาติและการดำเนินการที่ตรงไปตรงมา
อย่างไรก็ตาม มีความเสี่ยงต่อการผันผวนของประสิทธิภาพการทำงานกับโหลดและการเปลี่ยนแปลงอื่น ๆ และความแม่นยำและประสิทธิภาพไม่สูงพอสำหรับบางแอปพลิเคชัน อัลกอริธึมที่ซับซ้อนในตัวควบคุมมอเตอร์สามารถเอาชนะข้อบกพร่องเหล่านี้ได้ในระดับหนึ่งโดยการปรับเวลาเปิด/ปิด MOSFET เช่นเดียวกับการใช้การควบคุมแบบสัดส่วน-อินทิกรัล-อนุพันธ์ (PID) หรือสัดส่วน-อินทิกรัล (PI)
อีกทางเลือกหนึ่งที่น่าสนใจยิ่งขึ้นคือการควบคุมเวกเตอร์หรือที่เรียกว่าการควบคุมเชิงพื้นที่ (FOC) ในแนวทางนี้ ขดลวดทั้งสามจะได้รับพลังงานจากการควบคุมสนามแม่เหล็กที่หมุนอย่างต่อเนื่อง ส่งผลให้มีการเคลื่อนไหวที่นุ่มนวลขึ้นเมื่อเทียบกับการควบคุมแบบ 120 องศา FOC ได้ก้าวไปสู่จุดที่ปัจจุบันใช้ในผลิตภัณฑ์มวลรวมจำนวนมาก เช่น เครื่องซักเสื้อผ้า
ใน FOC กระแสของขดลวดสเตเตอร์แต่ละตัวจะถูกวัดและควบคุมโดยอัลกอริธึมขั้นสูงซึ่งต้องการการประมวลผลเชิงตัวเลขที่ซับซ้อน อัลกอริธึมยังต้องแปลงค่า AC สามเฟสอย่างต่อเนื่องเป็นค่า DC สองเฟส (กระบวนการที่เรียกว่าการแปลงเฟสพิกัด) เพื่อลดความซับซ้อนของสมการที่ตามมาและการคำนวณที่จำเป็นสำหรับการควบคุม (รูปที่ 5) ผลลัพธ์ของ FOC หากทำอย่างถูกต้อง จะเป็นการควบคุมที่แม่นยำและมีประสิทธิภาพสูง
 รูปที่ 5: ส่วนหนึ่งของอัลกอริธึม FOC ต้องการการแปลงเฟสพิกัดเพื่อลดความซับซ้อนของการคำนวณการประมวลผลเชิงตัวเลขที่ซับซ้อน (แหล่งรูปภาพ: Renesas)
รูปที่ 5: ส่วนหนึ่งของอัลกอริธึม FOC ต้องการการแปลงเฟสพิกัดเพื่อลดความซับซ้อนของการคำนวณการประมวลผลเชิงตัวเลขที่ซับซ้อน (แหล่งรูปภาพ: Renesas)
ตัวเลือกเซ็นเซอร์สำหรับการป้อนกลับ
มอเตอร์ BLDC สามารถควบคุมได้ในโทโพโลยีแบบวงเปิดโดยไม่มีสัญญาณป้อนกลับ หรือผ่านอัลกอริธึมลูปปิดที่มีการป้อนกลับจากเซ็นเซอร์ที่มอเตอร์ การตัดสินใจเป็นหน้าที่ของการพิจารณาความถูกต้อง ความน่าเชื่อถือ และความปลอดภัยของแอปพลิเคชัน
การเพิ่มเซ็นเซอร์ป้อนกลับจะเพิ่มค่าใช้จ่ายและความซับซ้อนของอัลกอริทึม แต่เพิ่มความมั่นใจในการคำนวณ ทำให้จำเป็นในการใช้งานจำนวนมาก พารามิเตอร์การเคลื่อนไหวที่น่าสนใจหลักคือตำแหน่งของโรเตอร์หรือความเร็ว ทั้งนี้ขึ้นอยู่กับแอปพลิเคชัน ปัจจัยทั้งสองนี้มีความสัมพันธ์กันอย่างใกล้ชิด: ความเร็วเป็นตัวกำหนดเวลาของตำแหน่ง และตำแหน่งเป็นตัวกำหนดเวลาของความเร็ว
ที่จริงแล้ว เซ็นเซอร์ป้อนกลับเกือบทั้งหมดระบุตำแหน่ง และตัวควบคุมสามารถใช้สัญญาณโดยตรงหรือพัฒนาอนุพันธ์เพื่อกำหนดความเร็ว ในกรณีที่ง่ายกว่า บทบาทหลักของเซ็นเซอร์ป้อนกลับคือการตรวจสอบที่เกี่ยวข้องกับความปลอดภัยเกี่ยวกับประสิทธิภาพของมอเตอร์พื้นฐานหรือเป็นตัวบ่งชี้การหยุดชะงัก แทนที่จะเป็นการควบคุมแบบวงปิด
เซ็นเซอร์ป้อนกลับสี่ประเภทมีการใช้งานทั่วไป: อุปกรณ์ Hall-effect, ตัวเข้ารหัสออปติคัล, รีโซลเวอร์และเซ็นเซอร์อุปนัย (รูปที่ 6) แต่ละรายการมีคุณลักษณะด้านประสิทธิภาพ ความละเอียด และต้นทุนที่แตกต่างกัน
 รูปที่ 6: ผู้ใช้มีตัวเลือกเซ็นเซอร์ที่หลากหลาย หากระบบของพวกเขาต้องการสัญญาณตอบรับมอเตอร์ ตั้งแต่อุปกรณ์เอฟเฟกต์ฮอลล์ไปจนถึงตัวเข้ารหัส รีโซลเวอร์ และเซ็นเซอร์เหนี่ยวนำ (แหล่งรูปภาพ: Renesas)
รูปที่ 6: ผู้ใช้มีตัวเลือกเซ็นเซอร์ที่หลากหลาย หากระบบของพวกเขาต้องการสัญญาณตอบรับมอเตอร์ ตั้งแต่อุปกรณ์เอฟเฟกต์ฮอลล์ไปจนถึงตัวเข้ารหัส รีโซลเวอร์ และเซ็นเซอร์เหนี่ยวนำ (แหล่งรูปภาพ: Renesas)
โดยทั่วไปแล้วอุปกรณ์ Hall effect จะถือว่าง่ายที่สุดและง่ายที่สุดในการติดตั้ง และเพียงพอสำหรับหลายสถานการณ์ ออปติคัลเอ็นโค้ดเดอร์มีความละเอียดให้เลือกตั้งแต่ต่ำถึงสูงปานกลาง แต่มีความท้าทายในการติดตั้งและอาจมีข้อกังวลด้านความน่าเชื่อถือในระยะยาว รีโซลเวอเรเตอร์และเซ็นเซอร์อุปนัยมีขนาดใหญ่กว่า หนักกว่า มีราคาสูงกว่า และมาพร้อมกับความท้าทายด้านอินเทอร์เฟซ แต่ให้ความละเอียดที่สูงมากและประสิทธิภาพในระยะยาว
ส่งมอบกระแส
ขั้วของมอเตอร์ไร้แปรงถ่าน—ไม่ว่าจะเป็น BLDC หรือสเต็ปเปอร์—เป็น “ขดลวดแม่เหล็กไฟฟ้า” และต้องถูกขับเคลื่อนด้วยกระแสมากกว่าแรงดัน ในการจ่ายไฟให้เสาเหล่านี้อย่างเหมาะสม ระบบควบคุมมอเตอร์จะต้องส่งกระแสไฟนี้ผ่านสวิตช์เปิด/ปิด (MOSFET ในกรณีส่วนใหญ่) ด้วยจังหวะเวลาที่แม่นยำ ความกว้างของพัลส์ และอัตราการฆ่าที่ควบคุมได้เพื่อขับเคลื่อนมอเตอร์อย่างเหมาะสมและมีประสิทธิภาพ การจัดเตรียมการขับขี่ยังต้องปกป้อง MOSFET จากสภาวะความผิดปกติต่าง ๆ เช่น มอเตอร์หยุดทำงาน ความต้องการกระแสไฟที่มากเกินไป ความร้อนเกิน และไฟฟ้าลัดวงจร
สำหรับมอเตอร์ที่มีขนาดค่อนข้างเล็ก โดยทั่วไปต้องใช้ต่ำกว่า 500 มิลลิแอมแปร์ (mA) ต่อหนึ่งแอมแปร์ (A) เป็นไปได้ที่จะฝังไดรเวอร์เกท MOSFET และแม้แต่ MOSFET ลงในแพ็คเกจ IC ควบคุมมอเตอร์ เพื่อรักษารอยเท้าให้เล็กที่สุด แม้ว่าวิธีนี้จะสะดวกและทำให้การออกแบบง่ายขึ้น แต่ก็ไม่ใช่ตัวเลือกที่ใช้งานได้จริงในหลายกรณีด้วยเหตุผลหลายประการ:
- กระบวนการเซมิคอนดักเตอร์สำหรับ MOSFET ที่มีประสิทธิภาพสูงนั้นแตกต่างอย่างมากจากกระบวนการที่ใช้สำหรับลอจิกดิจิทัลของคอนโทรลเลอร์ ดังนั้นการออกแบบขั้นสุดท้ายของการรวมกันจึงเป็นการประนีประนอม (แต่อาจเป็นที่ยอมรับได้)
- การกระจายพลังงานของ MOSFET และการจัดการความร้อนนั้นถูกกำหนดโดยส่วนใหญ่โดยความต้องการพลังงานของแอพพลิเคชั่น เมื่อระดับกระแสไฟและพลังงานเพิ่มขึ้น การกระจาย MOSFET บนชิปและความร้อนที่สร้างขึ้นจะเกินขีดจำกัดของแพ็คเกจในไม่ช้า ในกรณีเหล่านี้ ทางออกที่ดีกว่าคือการแยกฟังก์ชันดิจิตอลและพลังงานออกจากกัน ทำให้ผู้ออกแบบสามารถปรับตำแหน่งและการจัดการระบายความร้อนของ MOSFET ได้อย่างเหมาะสม
- ในที่สุด เมื่อระดับกระแสไฟที่มอเตอร์ต้องการเพิ่มขึ้น การเพิ่มขึ้นของแรงดันตกคร่อม IR ที่เพิ่มขึ้นในสายจ่ายของมอเตอร์อาจกลายเป็นปัญหาได้ ดังนั้นจึงแนะนำให้วางอุปกรณ์สวิตชิ่งให้ใกล้กับโหลดมากขึ้น
ด้วยเหตุผลเหล่านี้ IC ควบคุมมอเตอร์และการเคลื่อนไหวจำนวนมากจึงมีฟังก์ชันที่จำเป็นทั้งหมด ยกเว้น MOSFET กำลัง โทโพโลยีของ MOSFET หลายตัวมักเรียกว่าฟังก์ชันอินเวอร์เตอร์ การใช้ MOSFET แบบแยกส่วนทำให้ผู้ออกแบบมีความยืดหยุ่นในการเลือกอุปกรณ์ที่มีข้อกำหนดร่วมกันอย่างเหมาะสมสำหรับปัจจัยต่าง ๆ เช่น กระแสโหลด, ความต้านทานแบบ "เปิด", ประเภทบรรจุภัณฑ์ และคุณสมบัติของสวิตชิ่ง
IC ที่ซับซ้อนตอบสนองความท้าทายในการควบคุมมอเตอร์
ในอดีต การควบคุมมอเตอร์ขั้นสูงจำเป็นต้องมีการประกอบ IC โดยทั่วไปแล้ว อาจเกี่ยวข้องกับโปรเซสเซอร์ระดับล่างในการออกคำสั่งทั่วไปด้วยตัวประมวลผลร่วมที่เป็นตัวเลขเฉพาะเพื่อใช้อัลกอริทึมที่จำเป็นหรือโปรเซสเซอร์ระดับไฮเอนด์เพื่อทำทั้งสองอย่าง ควบคู่ไปกับวงจรเกทไดรฟ์สำหรับอุปกรณ์ไฟฟ้า สิ่งนี้ไม่เพียงแต่ต้องการรอยเท้าของบอร์ดพีซีที่ใหญ่ขึ้นและรายการวัสดุ (BOM) ที่ยาวขึ้น แต่มักจะมีปัญหาการรวมระบบและปัญหาการดีบักที่เกี่ยวข้อง
อย่างไรก็ตาม IC ควบคุมมอเตอร์ในปัจจุบันสามารถทำได้ทุกอย่างในอุปกรณ์เครื่องเดียว ดังที่แสดงโดย Renesas RAJ306010 (รูปที่ 7) ภายใน RAJ306010 มีบล็อคการทำงานจำนวนมากที่กำหนดเป้าหมายเฉพาะความต้องการเฉพาะของการออกแบบการควบคุมมอเตอร์
") รูปที่ 7: Renesas RAJ306010 IC มีฟังก์ชันที่จำเป็นสำหรับการควบคุมมอเตอร์ขั้นสูง (ยกเว้น MOSFET กำลังไฟฟ้า) ดังนั้นจึงใช้พื้นที่น้อยกว่าโซลูชัน multi-IC ในขณะที่ทำให้ทั้ง BOM และการรวมการออกแบบง่ายขึ้น (แหล่งรูปภาพ: Renesas)
รูปที่ 7: Renesas RAJ306010 IC มีฟังก์ชันที่จำเป็นสำหรับการควบคุมมอเตอร์ขั้นสูง (ยกเว้น MOSFET กำลังไฟฟ้า) ดังนั้นจึงใช้พื้นที่น้อยกว่าโซลูชัน multi-IC ในขณะที่ทำให้ทั้ง BOM และการรวมการออกแบบง่ายขึ้น (แหล่งรูปภาพ: Renesas)
IC ควบคุมมอเตอร์เอนกประสงค์นี้มีไว้สำหรับการใช้งานมอเตอร์ DC แบบไม่มีแปรงถ่านสามเฟส มันรวมและรวมสองบทบาทที่แตกต่างกันอย่างแน่นหนาในแพ็คเกจ QFN ขนาดจิ๋ว 8 × 8 มม. (มม.) 64 ลีด: ฟังก์ชันตัวควบคุมดิจิทัล และฟังก์ชันพรีไดรเวอร์แบบแอนะล็อกส่วนใหญ่ ทำงานตั้งแต่การจ่ายไฟตั้งแต่ 6 ถึง 24 โวลต์และกำหนดเป้าหมายแบบสแตนด์อโลน ส่วนใหญ่เป็นการใช้งานแบบอัตโนมัติ เช่น เครื่องมือไฟฟ้า เครื่องมือทำสวน เครื่องดูดฝุ่น เครื่องพิมพ์ พัดลม ปั๊ม และหุ่นยนต์ (โปรดทราบว่ายกเว้นข้อมูลที่ว่า RAJ306001 เป็นรุ่น 6 ถึง 30 โวลต์นอกนั้นมีคุณสมบัติเหมือนและใช้แผ่นข้อมูลเดียวกันกับ RAJ306010)
ในด้านดิจิทัล RAJ306010 มีไมโครคอนโทรลเลอร์ 16 บิต ( คลาสRL78/G1F ของ Renesas) รองรับแฟลช ROM 64 กิโลไบต์ (Kbytes), data flash ROM 4 Kbytes และ RAM 5.5 Kbytes นอกจากนี้ยังมี I/O ดิจิทัลจำนวนมาก: วัตถุประสงค์ทั่วไป I/O (GPIO), SPI, I2 C และ UART นอกจากนี้ยังมีตัวแปลงอนาล็อกเป็นดิจิตอล (ADC) แบบ 9 แชนเนล 10 บิตเพื่อนำสัญญาณแอนะล็อกเข้าสู่อุปกรณ์
ในการใช้ RAJ306010 ผู้ออกแบบระบบจะโหลดพารามิเตอร์การทำงานที่ต้องการลงในรีจิสเตอร์ควบคุมหน่วยความจำแฟลชที่เหมาะสม เพื่อสร้างโหมดและเงื่อนไขการทำงานที่ต้องการ จากนั้น IC ก็พร้อมที่จะทำงานเมื่อเปิดเครื่องโดยไม่ต้องใช้ไมโครคอนโทรลเลอร์เพิ่มเติม ดังที่เห็นในแผนภาพบล็อกระบบระดับสูงของแอปพลิเคชันทั่วไป (รูปที่ 8)
 รูปที่ 8: ไดอะแกรมบล็อกระบบระดับสูงของแอปพลิเคชันพื้นฐานโดยใช้ RAJ306001 แสดงให้เห็นว่าการผสานรวมในระดับสูงช่วยลดความจำเป็นในส่วนประกอบที่ไม่ต่อเนื่องเพิ่มเติมได้อย่างไร (แหล่งรูปภาพ: Renesas)
รูปที่ 8: ไดอะแกรมบล็อกระบบระดับสูงของแอปพลิเคชันพื้นฐานโดยใช้ RAJ306001 แสดงให้เห็นว่าการผสานรวมในระดับสูงช่วยลดความจำเป็นในส่วนประกอบที่ไม่ต่อเนื่องเพิ่มเติมได้อย่างไร (แหล่งรูปภาพ: Renesas)
ด้านแอนะล็อกของ RAJ306010 มีตัวขับเกทแบบฮาล์ฟบริดจ์สามตัวพร้อมกระแสไฟสูงสุดของเกทไดรฟ์ที่ปรับได้สูงถึง 500 mA ฟังก์ชันตัวสร้างเดดไทม์ที่ปรับแนวได้เองเพื่อป้องกันไม่ให้บริดจ์ “ทะลุ” และเกิดความเสียหาย แอมพลิฟายเออร์ตรวจจับกระแส และแอมพลิฟายเออร์ back-EMF ปั๊มชาร์จแบบรวมจะช่วยเพิ่มไดรฟ์เกตที่ส่งถึง 13 โวลต์จากแหล่งจ่ายแรงดันไฟฟ้าที่ต่ำกว่า
มีการรองรับเซ็นเซอร์ Hall effect โดยตรง และสามารถใช้ front-end แบบอะนาล็อก (AFE) เพื่อรองรับเซ็นเซอร์ป้อนกลับประเภทอื่น ๆ ได้ เช่นเดียวกับการควบคุมมอเตอร์ที่ได้รับการออกแบบอย่างเหมาะสม มีฟังก์ชันต่างๆ รวมถึงการป้องกันอุณหภูมิเกิน การล็อคแรงดันไฟเกิน/ต่ำ (UVLO) การตรวจจับกระแสเกิน และการป้องกันสภาวะการล็อกมอเตอร์
ตัวอย่างในรูปที่ 9 แสดงให้เห็นว่า RAJ306010 จัดการกับแอพพลิเคชั่นพื้นฐานแบบสแตนด์อโลนได้อย่างง่ายดายได้อย่างไร เช่น เครื่องปั่นไร้สาย 24 โวลต์ แม้ว่าจะเป็นอุปกรณ์ขนาดเล็กเกือบทุกชนิดที่คล้ายคลึงกันก็ตาม โปรดทราบว่าวงจรส่วนใหญ่ใช้สำหรับการชาร์จและจัดการชุดแบตเตอรี่แปดเซลล์ ในขณะที่การควบคุมมอเตอร์ต้องการเพียง IC ควบคุม บริดจ์สามเฟสภายนอก (อินเวอร์เตอร์) วงจรรับรู้แรงดันป้อนกลับ (ผ่านกระแสไฟ) - ตัวต้านทานความรู้สึก) และปุ่ม "เริ่มต้น" ของผู้ใช้
") รูปที่ 9: การรวมฟังก์ชันการทำงานระดับสูงของ RAJ306010 แสดงให้เห็นชัดเจนว่าวงจรเพิ่มเติมมีน้อยเพียงใดและส่วนประกอบเพิ่มเติมเพียงเล็กน้อยที่จำเป็นสำหรับฟังก์ชันการควบคุมมอเตอร์หลักของอุปกรณ์พื้นฐาน เช่น เครื่องปั่นที่ใช้แบตเตอรี่นี้ (แหล่งรูปภาพ: Renesas)
รูปที่ 9: การรวมฟังก์ชันการทำงานระดับสูงของ RAJ306010 แสดงให้เห็นชัดเจนว่าวงจรเพิ่มเติมมีน้อยเพียงใดและส่วนประกอบเพิ่มเติมเพียงเล็กน้อยที่จำเป็นสำหรับฟังก์ชันการควบคุมมอเตอร์หลักของอุปกรณ์พื้นฐาน เช่น เครื่องปั่นที่ใช้แบตเตอรี่นี้ (แหล่งรูปภาพ: Renesas)
ลงมือปฏิบัติจริงด้วยระบบควบคุมมอเตอร์ BLDC
การวางแผน จำลองสถานการณ์ ประเมิน และปรับแอปพลิเคชันควบคุมมอเตอร์ “บนกระดาษ” หรือบนพีซีโดยใช้รุ่นต่าง ๆ ของระบบโดยรวมนั้นเป็นสิ่งหนึ่งที่ต้องวางแผน อย่างไรก็ตาม การใช้งานมอเตอร์จริงและทดสอบประสิทธิภาพโดยใช้ส่วนประกอบจริง โหลดจริง และไดนามิกจริง เป็นอีกเรื่องหนึ่ง รวมถึงการเรียนรู้ผลกระทบของการตั้งค่าเงื่อนไขการเริ่มต้นเริ่มต้นและการเปลี่ยนแปลงในพารามิเตอร์ประสิทธิภาพต่าง ๆ
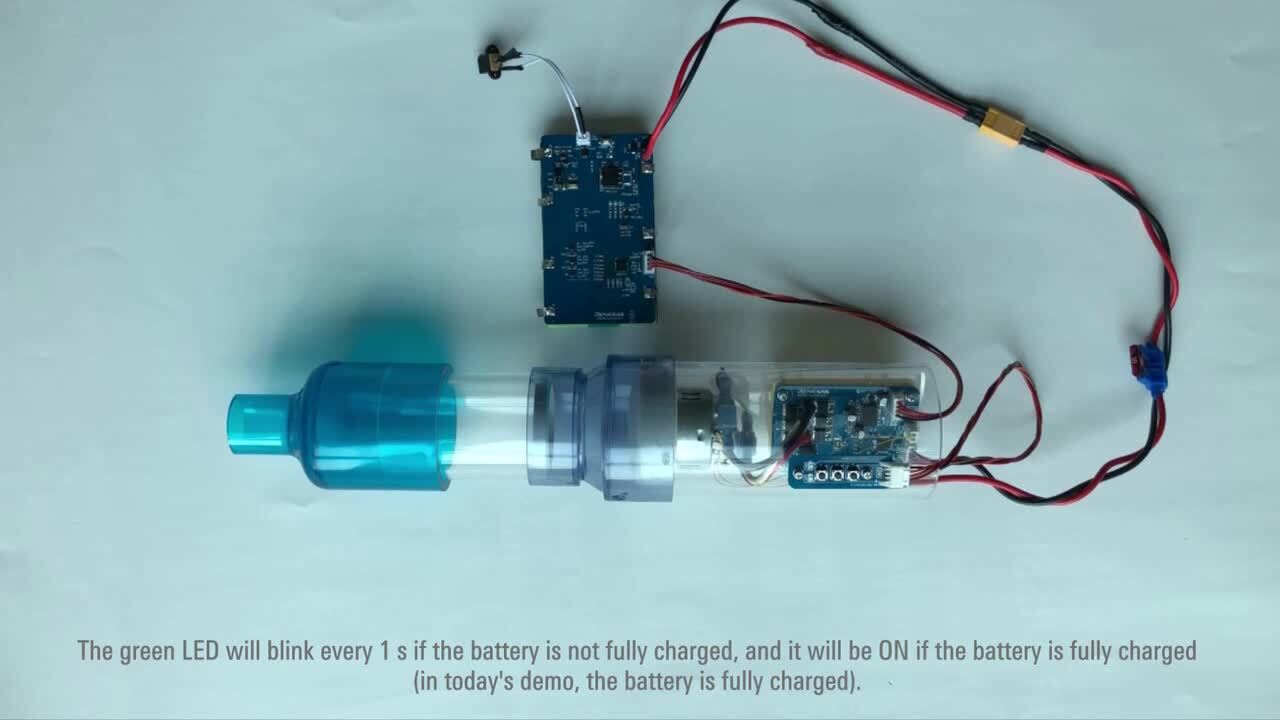
นั่นคือสิ่งที่ทำให้ RTK0EML2C0S01020BJ ระบบประเมินการควบคุมมอเตอร์ จาก Renesas (ภาพที่ 10) เป็นทรัพย์สินที่สำคัญสำหรับวิศวกรออกแบบพร้อมกับRenesas Motor Workbench เพื่อความสะดวกในการดีบัก เครื่องมือซอฟต์แวร์นี้ช่วยให้ผู้ออกแบบทำความคุ้นเคยกับการทำงานของ RAJ306010 โหมดอินพุตและเอาต์พุต และฟังก์ชันของรีจิสเตอร์ควบคุมต่าง ๆ
 รูปที่ 10: บอร์ดนี้เป็นแกนหลักของระบบประเมินการควบคุมมอเตอร์ Renesas RTK0EML2C0S01020BJ เมื่อใช้ร่วมกับซอฟต์แวร์ Renesas Motor Workbench จะปรับความเร็วของพารามิเตอร์อย่างละเอียดและประเมินประสิทธิภาพของมอเตอร์เมื่อใช้ IC ควบคุมมอเตอร์ RAJ306010 (แหล่งรูปภาพ: Renesas)
รูปที่ 10: บอร์ดนี้เป็นแกนหลักของระบบประเมินการควบคุมมอเตอร์ Renesas RTK0EML2C0S01020BJ เมื่อใช้ร่วมกับซอฟต์แวร์ Renesas Motor Workbench จะปรับความเร็วของพารามิเตอร์อย่างละเอียดและประเมินประสิทธิภาพของมอเตอร์เมื่อใช้ IC ควบคุมมอเตอร์ RAJ306010 (แหล่งรูปภาพ: Renesas)
เพื่อให้ขั้นตอนการพัฒนาผลิตภัณฑ์ดำเนินไปอย่างรวดเร็วยิ่งขึ้น ระบบการประเมินได้รวมมอเตอร์ BLDC 24 โวลต์/420 มิลลิแอมป์ ที่มีความเร็วรอบขณะไม่โหลด 3900 รอบต่อนาที และแรงบิดสูงสุด 19.6 มิลลินิวตัน-เมตร (mN-m) (เทียบเท่า 200 -กรัม แรง-เซนติเมตร) นอกจากนี้ Renesas ยังมีรูทีนการควบคุมซอฟต์แวร์ตัวอย่างสำหรับทั้งการควบคุมแบบไม่ใช้เซ็นเซอร์และแบบเซ็นเซอร์
บทสรุป
นักออกแบบที่รวมมอเตอร์กระแสตรงเข้ากับระบบของพวกเขามีตัวเลือกมากมายนอกเหนือจากมอเตอร์กระแสตรงแบบแปรงถ่านแบบคลาสสิก เนื่องจากมอเตอร์ BLDC ประสิทธิภาพสูงและคุ้มค่าคุ้มราคามีจำหน่ายที่ให้กำลังและความแม่นยำในบรรจุภัณฑ์ขนาดเล็ก เพื่อให้ทราบถึงศักยภาพของมอเตอร์ BLDC เหล่านี้อย่างเต็มที่ ตัวควบคุมอัจฉริยะจึงรวมและใช้อัลกอริธึมที่จำเป็นกับพารามิเตอร์ที่ผู้ใช้ต้องการ พวกเขายังจัดเตรียมไดรฟ์ที่จำเป็นสำหรับ MOSFET สวิตชิ่งของมอเตอร์และ I/O อะนาล็อกอื่น ๆ สำหรับโซลูชันการควบคุมมอเตอร์ที่สมบูรณ์
ดังที่แสดงไว้ ไอซีอย่าง Renesas RAJ306010 ซึ่งได้รับการสนับสนุนโดยชุดพัฒนาและซอฟต์แวร์ ทำให้ความท้าทายด้านการออกแบบง่ายขึ้นอย่างมากในการมอบประสิทธิภาพสูง ขนาดเล็ก และการควบคุมมอเตอร์ที่มีประสิทธิภาพสำหรับการใช้งานต่างๆ เช่น เครื่องใช้ไฟฟ้า เบาะรถยนต์ และหน้าต่าง และอื่น ๆ อีกมากมายในขณะนี้- แอปพลิเคชันทั่วไป
อ้างอิง
- อัลกอริธึมการควบคุมมอเตอร์ BLDC
- RTK0EML2C0S01020BJ BLDC ระบบประเมินการควบคุมมอเตอร์สำหรับ RAJ3060xx ไอซีควบคุมมอเตอร์
- หมายเหตุการใช้งาน R01AN3786EJ0102 “การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์สำหรับมอเตอร์ซิงโครนัสแม่เหล็กถาวร (อัลกอริทึม)”
- โซลูชันเครื่องมือไฟฟ้าแบบพกพา
- เครื่องปั่นไร้สาย 24V
- โซลูชันสำหรับมอเตอร์: สภาพแวดล้อมการพัฒนาการควบคุมมอเตอร์ที่ใช้งานง่ายเพื่อลดระยะเวลาออกสู่ตลาด
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.