SMEs สามารถใช้ Industrial Metaverse เพื่อสำรวจและปรับใช้โซลูชันหุ่นยนต์ได้อย่างรวดเร็วอย่างไร
Contributed By DigiKey's North American Editors
2024-11-21
หุ่นยนต์และหุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) ถือเป็นเทคโนโลยีระบบอัตโนมัติที่ล้ำสมัยที่สุดในโรงงาน ฝาแฝดทางดิจิทัลและความเป็นจริงเสมือน (VR) เป็นเครื่องมือแนวหน้าในการออกแบบและพัฒนา เมื่อนำมาใช้ร่วมกัน สามารถนำไปใช้สร้างเมตาเวิร์สอุตสาหกรรมที่มอบผลผลิตที่สูงขึ้นได้อย่างรวดเร็ว แม้แต่สำหรับวิสาหกิจขนาดกลางและขนาดย่อม (SMEs)
นักออกแบบที่ SMEs สามารถได้รับประโยชน์จากอินเทอร์เฟซที่เรียบง่ายและใช้งานง่ายซึ่งรวมเอาฝาแฝดทางดิจิทัล โมเดลเสมือนจริงที่มีรายละเอียดสูงของวัตถุทางกายภาพ เช่น หุ่นยนต์เดลต้า หุ่นยนต์เชิงเส้น หรือหุ่นยนต์หลายแกน และสภาพแวดล้อม VR สามมิติ (3D) เพื่อให้สามารถดำเนินการและตรวจสอบลำดับการเคลื่อนไหวของหุ่นยนต์ได้โดยตรง
การใช้คุณลักษณะเหล่านี้รองรับการปรับแต่งและเพิ่มประสิทธิภาพของระบบอัตโนมัติแม้จะไม่มีฮาร์ดแวร์ทางกายภาพใดๆ ก็ตาม และช่วยให้สามารถสำรวจความเป็นไปได้ของโซลูชันต่างๆ ได้อย่างรวดเร็ว
บทความนี้จะกล่าวถึงความแตกต่างระหว่างฝาแฝดทางคณิตศาสตร์ที่อธิบายด้วยข้อมูลและฝาแฝดทางภาพ (ฝาแฝด VR) และความแตกต่างว่าทั้งสองอย่างนี้จำเป็นอย่างไรในการสร้างเมตาเวิร์สทางอุตสาหกรรม จากนั้นจะนำเสนอระบบควบคุมหุ่นยนต์และซอฟต์แวร์ที่เกี่ยวข้องจาก Igus ที่สามารถนำไปใช้จำลองหุ่นยนต์บนอินเทอร์เฟซสามมิติ (ฝาแฝดภาพดิจิทัล) ได้โดยไม่ต้องใช้ฮาร์ดแวร์ทางกายภาพใด ๆ พร้อมทั้งหุ่นยนต์เดลต้า หุ่นยนต์เชิงเส้น และหุ่นยนต์หลายแกนที่เข้ากันได้ ซึ่งสามารถใช้เพื่อให้เกิดผลโซลูชันที่เหมาะสมที่สุดได้
ฝาแฝดทางดิจิทัลและ VR เป็นเทคโนโลยีที่เสริมกันโดยใช้รูปแบบการแสดงภาพ การโต้ตอบ และฮาร์ดแวร์ที่แตกต่างกัน ฝาแฝดทางดิจิตอลคือแบบจำลองของวัตถุทางกายภาพ ระบบ หรือกระบวนการต่างๆ ที่ใช้ข้อมูลเป็นหลัก ออกแบบมาเพื่อให้ใช้งานได้ตลอดวงจรชีวิตของสินค้าที่ถูกสร้างแบบจำลอง ตั้งแต่การออกแบบเริ่มต้นจนถึงการปลดระวางและการรีไซเคิล
VR เป็นเทคโนโลยีแบบดื่มด่ำที่เน้นภาพซึ่งยังใช้โมเดลดิจิตอลด้วย ในสภาพแวดล้อม VR นั้นสามารถจำลองความสัมพันธ์และการโต้ตอบระหว่างวัตถุได้ เช่น หุ่นยนต์ปฏิบัติงาน ดังนั้น แม้ว่าทั้งสองเทคโนโลยีจะใช้สำหรับการออกแบบและการจำลองได้ แต่เทคโนโลยีฝาแฝดทางดิจิทัลจะมุ่งเน้นไปที่การพิจารณาถึงวงจรชีวิตโดยรวม ส่วน VR มุ่งเน้นไปที่การโต้ตอบระหว่างวัตถุทางกายภาพ
เมตาเวิร์สผสมผสานฝาแฝดทางดิจิตอลและ VR เข้าด้วยกันเพื่อสร้างสภาพแวดล้อมเสมือนที่สร้างขึ้นโดยเฉพาะ ซึ่งรองรับการโต้ตอบแบบเรียลไทม์ระหว่างวัตถุดิจิทัลและบุคคล มักจะเกี่ยวข้องกับเกมแต่มีการนำมาใช้ในกิจกรรมทางธุรกิจและอุตสาหกรรมมากขึ้น
ยินดีต้อนรับสู่ iguverse
Igus ได้พัฒนา iguverse metaverse เพื่อรองรับการโต้ตอบทางวิศวกรรมในสภาพแวดล้อมทางอุตสาหกรรม เช่น การพัฒนาและการใช้งานระบบหุ่นยนต์ สามารถนำ iguverse มาใช้งานได้ผ่าน ซอฟต์แวร์ ระบบควบคุมหุ่นยนต์ Igus (iRC) แอปพลิเคชันฟรีและไม่มีค่าลิขสิทธิ์นี้ช่วยให้ผู้ใช้สามารถควบคุมหุ่นยนต์ได้หลายประเภท รวมถึงหุ่นยนต์เดลต้า โคบอท (แขนหุ่นยนต์) และหุ่นยนต์แกนทรี
โดยให้ผู้ใช้งานได้ใช้งานอินเทอร์เฟซแบบ 3D และโปรแกรมตัวอย่างมากกว่า 100 รายการ ข้อกำหนดของระบบสำหรับการใช้ iRC ได้แก่ พีซี (CPU ขั้นต่ำ Intel i5) ที่ใช้ Windows 10 หรือ 11 (64 บิต) พร้อมพื้นที่ว่างบนดิสก์ 500 MB และสามารถเชื่อมต่อผ่านเครือข่ายอีเทอร์เน็ตหรือไร้สายได้
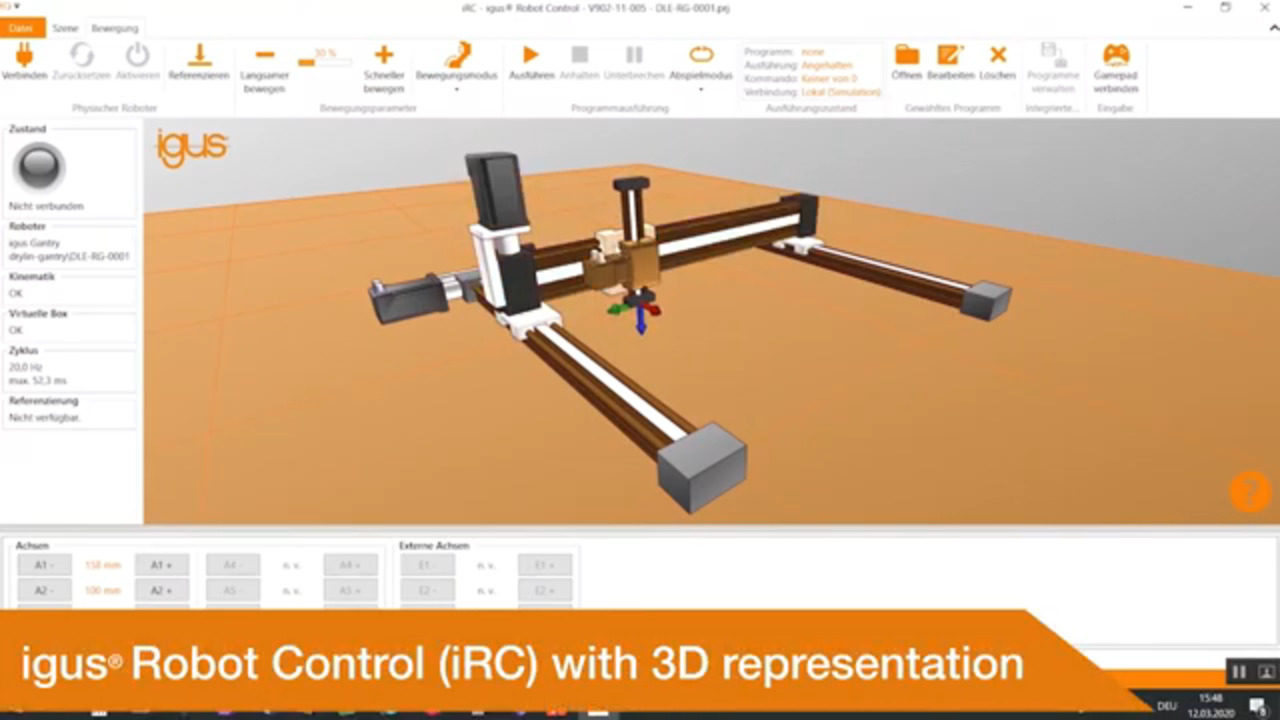
แกนหลักของซอฟต์แวร์คือฝาแฝดดิจิทัลสามมิติของหุ่นยนต์ที่กำลังถูกตั้งโปรแกรม ตัวอย่างนี้คือแบบจำลองหุ่นยนต์แกนทรีเชิงเส้นสามแกน DLE-RG-0001-AC-500-500-100 ด้วยพื้นที่ทำงาน 500 x 500 x 100 มม. หรือโมเดลตัวกระตุ้น xy สองแกน DLE-LG-0012-AC-800-500 โดยมีพื้นที่ทำงาน 800 x 500 มม. (รูปที่ 1) นักออกแบบสามารถกำหนดการเคลื่อนไหวได้ด้วยการคลิกเมาส์เพียงไม่กี่ครั้ง และใช้โมเดล 3 มิติเพื่อให้แน่ใจว่าการเคลื่อนไหวที่ต้องการนั้นเป็นไปได้ แม้จะยังไม่ได้ซื้อหุ่นยนต์ก็ตาม
 รูปที่ 1: ตัวอย่างฝาแฝดแบบดิจิตอล 3D VR ของหุ่นยนต์แกนทรีสามแกนใน iguverse (แหล่งที่มาภาพ: Igus)
รูปที่ 1: ตัวอย่างฝาแฝดแบบดิจิตอล 3D VR ของหุ่นยนต์แกนทรีสามแกนใน iguverse (แหล่งที่มาภาพ: Igus)
นอกเหนือจากซอฟต์แวร์ iRC แล้วตัวควบคุมหุ่นยนต์ยังเป็นองค์ประกอบสำคัญในสภาพแวดล้อมการพัฒนา iguverse อีกด้วย เช่นแบบจำลอง IRC-LG12-02000 สำหรับมอเตอร์ 48 V มีอินพุต 7 ช่องและเอาต์พุต 7 ช่อง และมีสายเคเบิลยาว 10 ม. สำหรับเชื่อมต่อกับหุ่นยนต์ ตัวควบคุม IRC ประกอบด้วยโมดูลไดรฟ์มอเตอร์สำหรับมอเตอร์สเต็ปเปอร์ไบโพลาร์ขนาดต่าง ๆ และสามารถปรับแต่งหรือกำหนดค่าไว้ล่วงหน้าได้ นอกจากนี้ยังมีอินเทอร์เฟซต่างๆ หลายตัวสำหรับการรวมระบบ รวมถึง:
- อินเทอร์เฟซตัวควบคุมลอจิกที่ตั้งโปรแกรมได้ (PLC) สำหรับการควบคุมผ่านอินพุตและเอาต์พุตดิจิทัล โดยเฉพาะอย่างยิ่งสำหรับการเริ่มต้นและหยุดโปรแกรมที่ง่ายดายผ่าน PLC หรือปุ่มกด
- อินเทอร์เฟซ Modbus TCP สำหรับการควบคุมผ่าน PLC หรือพีซี
- Common Robotic Interface (CRI) อีเธอร์เน็ตสำหรับการควบคุมและกำหนดค่าโดยใช้ PLC หรือพีซี
- อินเทอร์เฟซระบบปฏิบัติการหุ่นยนต์ (ROS) สำหรับการสั่งการหุ่นยนต์โดยใช้ ROS
- อินเทอร์เฟซสำหรับกล้องตรวจจับวัตถุ
- อินเทอร์เฟซคลาวด์สำหรับการตรวจสอบสถานะของหุ่นยนต์จากระยะไกล
รองรับจลนศาสตร์
iguverse รองรับจลนศาสตร์ต่าง ๆ (การเคลื่อนไหวพื้นฐาน) ที่กำหนดการเคลื่อนไหวที่ควบคุมได้ของหุ่นยนต์ นอกเหนือจากจลนศาสตร์ที่กำหนดไว้ล่วงหน้าแล้ว ยังสามารถกำหนดค่าแกนอิสระทางจลนศาสตร์ได้อีกสูงสุด 3 แกนใน IRC จลนศาสตร์ที่กำหนดค่าไว้ล่วงหน้าประกอบด้วย:
- หุ่นยนต์เดลต้า 2 แกน และ 3 แกน
- หุ่นยนต์แกนทรี,
- 2 แกน (แกน X และ Y)
- 2 แกน (แกน Y และ Z)
- 3 แกน (แกน X, Y และ Z)
- แขนหุ่นยนต์ (โคบอท)
- 3 แกน (แกน 1, 2, 3)
- 3 แกน (แกน 2, 3, 4)
- 4 แกน (แกน 1, 2, 3, 4)
- 4 แกน (แกน 2, 3, 4, 5)
- 5 แกน (แกน 1 ถึง 5)
- 6 แกน (แกน 1 ถึง 6)
- หุ่นยนต์ SCARA 4 แกน
การเขียนโปรแกรมที่ง่ายสำหรับระบบอัตโนมัติต้นทุนต่ำ
หุ่นยนต์ Igus และ IRC ได้รับการออกแบบมาเพื่อรองรับระบบอัตโนมัติต้นทุนต่ำ นั่นจะไม่สามารถเป็นไปได้เลยหากไม่มีอินเทอร์เฟซการเขียนโปรแกรมที่ใช้งานง่าย เมาส์ 3 ปุ่มหรือเกมแพดสามารถเคลื่อนที่และวางตำแหน่งหุ่นยนต์ในจักรวาลได้ ด้วยซอฟต์แวร์ IRC ผู้ใช้สามารถเคลื่อนย้ายแกนทั้งหมดของฝาแฝดทางดิจิทัลในอินเทอร์เฟซ 3 มิติได้อย่างอิสระ ฟังก์ชั่นการสอนรองรับการพัฒนาซอฟต์แวร์ควบคุมหุ่นยนต์ แม้ว่าจะไม่ได้เชื่อมต่อกับหุ่นยนต์จริงก็ตาม
ในการใช้งานการสอน ผู้ใช้จะต้องเคลื่อนย้ายหุ่นยนต์เสมือนจริงไปยังตำแหน่งที่ต้องการด้วยตนเอง และกำหนดวิธีการเคลื่อนที่ไปยังตำแหน่งนั้น กระบวนการนี้จะทำซ้ำจนกว่าจะสร้างโปรไฟล์การเคลื่อนไหวเสร็จสมบูรณ์ ศูนย์กลางเครื่องมือในซอฟต์แวร์ IRC ช่วยให้ผู้ใช้สามารถเพิ่มเอฟเฟกเตอร์ปลายสุดที่ตรงกัน เช่น กริปเปอร์ เพื่อปรับจุดศูนย์กลางเครื่องมือบนหุ่นยนต์ได้อย่างง่ายดายและอัตโนมัติ นอกจากนี้ สามารถเพิ่มการเชื่อมต่อกับระบบควบคุมอุตสาหกรรมระดับสูงได้อีกด้วย
กระบวนการเริ่มต้นด้วยการเปิดใช้งานหุ่นยนต์โดยใช้ปุ่ม “เชื่อมต่อ” “รีเซ็ต” และ “เปิดใช้งาน” ตามที่จำเป็นในอินเทอร์เฟซ สถานะ LED บน IRC ควรเปลี่ยนเป็นสีเขียว และสถานะควรแสดงว่า "ไม่มีข้อผิดพลาด" ตอนนี้สามารถป้อนโปรไฟล์การเคลื่อนไหวได้โดยใช้แท็บ “จ็อกกิ้ง” (รูปที่ 2)
 in the iguverse immersive development environment (click to enlarge)") รูปที่ 2: แท็บ “Jogging” (ซ้ายล่าง) ในสภาพแวดล้อมการพัฒนาแบบ Immersive ของ iguverse สามารถใช้เพื่อป้อนโปรไฟล์การเคลื่อนไหวได้ (ที่มาภาพ : Igus)
รูปที่ 2: แท็บ “Jogging” (ซ้ายล่าง) ในสภาพแวดล้อมการพัฒนาแบบ Immersive ของ iguverse สามารถใช้เพื่อป้อนโปรไฟล์การเคลื่อนไหวได้ (ที่มาภาพ : Igus)
หุ่นยนต์แกนทรี
หุ่นยนต์แกนทรี เช่นเดียวกับหุ่นยนต์ที่รวมอยู่ในตัวอย่างก่อนหน้าของ iguverse ประกอบด้วยแกนฐาน X สองแกน แกน Y และแกน Z ที่เป็นทางเลือก แกน Y เชื่อมต่อกับแกน X สองแกนขนาน และเคลื่อนที่ไปมาในอวกาศสองมิติ แกน Z เสริมรองรับการเคลื่อนไหวมิติที่สาม
หุ่นยนต์ Gantry จาก Igus มีซับในพลาสติกหล่อลื่นตัวเอง ทำให้เลื่อนและหมุนได้ราบรื่นและเงียบกว่าการออกแบบที่ใช้ลูกปืนแบบดั้งเดิม การออกแบบใหม่มีน้ำหนักเบากว่า ทนต่อการกัดกร่อน และไม่ต้องบำรุงรักษา ซึ่งเป็นคุณสมบัติที่สำคัญสำหรับ SME นอกจากนี้ หุ่นยนต์เหล่านี้ยังมีความสำคัญต่อ SMEs มาก เนื่องจากมีราคาถูกกว่าหุ่นยนต์เครนแบบเดิมถึง 40% ช่วยให้คืนทุนได้เร็วขึ้น (ROI)
หุ่นยนต์เหล่านี้เหมาะสำหรับการใช้งานสองประเภท: ความเร็วต่ำพร้อมภาระสูง หรือความเร็วสูงพร้อมภาระต่ำ การใช้งานตัวอย่าง ได้แก่ การบรรจุ การหยิบและวาง การติดฉลาก การจัดการวัสดุ และการประกอบ
มีให้เลือกหลายขนาด อุปกรณ์เสริมที่มีจำหน่าย ได้แก่ ข้อต่อ เอฟเฟกเตอร์ปลายเพลา และหน้าแปลนมอเตอร์ ตัวอย่างของหุ่นยนต์เครนขนาดกลาง ได้แก่:
- DLE-FG-0006-AC-650-650 เป็นเครนเคลื่อนที่แบบแบนสองมิติที่มีพื้นที่ทำงาน 650 x 650 มม. หุ่นยนต์ตัวนี้สามารถรับน้ำหนักบรรทุกได้สูงสุด 8 กิโลกรัม และมีอัตราไดนามิกสูงสุดถึง 20 ครั้งต่อนาที
- DLE-RG-0012-AC-800-800-500 เป็นเครนสามมิติที่มีพื้นที่ทำงาน 800 x 800 x 500 มม. สามารถรองรับน้ำหนักบรรทุกสูงสุด 10 กิโลกรัม ด้วยอัตราไดนามิกสูงสุด 20 ครั้งต่อนาที
ความสามารถในการวางบนพาเลท
การจัดวางผลิตภัณฑ์บนพาเลทเพื่อการขนส่งเป็นกิจกรรมประจำวันในกระบวนการผลิตและการขนส่ง สมาชิกใหม่ล่าสุดและใหญ่ที่สุดของ iguverse คือหุ่นยนต์แกนทรีขนาดใหญ่ XXL ที่มีพื้นที่ทำงาน 2,000 x 2,000 x 1,500 มม. เหมาะอย่างยิ่งสำหรับการใช้งานบนพาเลทที่มีน้ำหนักสูงสุด 10 กก. มีให้เลือกออกแบบตามต้องการโดยมีพื้นที่ทำงานสูงสุดถึง 6,000 x 6,000 x 1,500 มม.
หุ่นยนต์แกนทรีเหล่านี้สามารถหยิบชิ้นส่วนที่มีน้ำหนักได้ถึง 10 กิโลกรัม ขนส่งด้วยความเร็วสูงสุด 500 มม./วินาที และวางบนพาเลทด้วยความสามารถในการทำซ้ำได้ 0.8 มม. (รูปที่ 3) โซลูชันหุ่นยนต์จัดพาเลทของ Igus มีต้นทุนต่ำกว่าระบบที่เทียบเท่าถึง 60%
 รูปที่ 3: การจัดวางบนพาเลทเป็นกิจกรรมทั่วไปและสำคัญในการดำเนินการด้านการผลิตและโลจิสติกส์ และสามารถทำให้อัตโนมัติได้โดยใช้หุ่นยนต์เครน (แหล่งที่มาภาพ: Igus)
รูปที่ 3: การจัดวางบนพาเลทเป็นกิจกรรมทั่วไปและสำคัญในการดำเนินการด้านการผลิตและโลจิสติกส์ และสามารถทำให้อัตโนมัติได้โดยใช้หุ่นยนต์เครน (แหล่งที่มาภาพ: Igus)
หุ่นยนต์เดลต้า
เช่นเดียวกับหุ่นยนต์แกนทรี หุ่นยนต์เดลต้ามีให้เลือกใช้สองหรือสามแกน หุ่นยนต์เดลต้ามีซองงานรูปโดมติดตั้งอยู่เหนือพื้นที่ทำงาน มีความเร็วสูงเป็นพิเศษและมักใช้ในการจัดการวัสดุและการวางชิ้นส่วน ตัวอย่างของหุ่นยนต์เดลต้าของ Igus ได้แก่:
- RBTX-IGUS-0047 เป็นแบบออกแบบสามแกน โดยมีเส้นผ่านศูนย์กลางพื้นที่ทำงาน 660 มม. มีความแม่นยำ ±0.5 มม. รับน้ำหนักสูงสุด 5 กก. ความเร็วสูงสุด 0.7 ม./วินาที และสามารถหยิบได้สูงสุด 30 ครั้งต่อนาที (รูปที่ 4)
- RBTX-IGUS-0059 เป็นแบบออกแบบ 2 แกน โดยมีเส้นผ่านศูนย์กลางพื้นที่ทำงาน 700 มม. นอกจากนี้ยังมีความแม่นยำ ±0.5 มม. มีน้ำหนักบรรทุกสูงสุด 5 กิโลกรัม ความเร็วสูงสุด 2 ม./วินาที และสามารถหยิบได้สูงสุด 50 ชิ้นต่อนาที
 รูปที่ 4: ตัวอย่างของหุ่นยนต์เดลต้าสามแกนถัดจาก Igus iRC (ซ้าย) (แหล่งที่มาภาพ: DigiKey)
รูปที่ 4: ตัวอย่างของหุ่นยนต์เดลต้าสามแกนถัดจาก Igus iRC (ซ้าย) (แหล่งที่มาภาพ: DigiKey)
โคบอทแขนกล
นอกจากนี้ iguverse ยังรองรับโคบอทที่มีแขนข้อต่ออีกด้วย Cobots สามารถมีแกนได้ตั้งแต่ 2 ถึง 10 แกนหรือมากกว่า เรียกอีกอย่างว่าองศาอิสระ (DOF) โดยทั่วไปแล้วพวกเขาจะต้องมีงานจำนวนมากและสามารถทำงานที่ซับซ้อนร่วมกับบุคคลอื่นได้ โมเดล Igus REBEL-6DOF-02 มี 6 DOF และรุ่น REBEL-4DOF-02 มี 4 DOF ทั้งสองมีความแม่นยำ ±1 มม. ช่วงการทำงานที่กำหนด 400 มม. และสามารถหยิบจับได้ขั้นต่ำ 7 ครั้งต่อนาทีด้วยความเร็วเชิงเส้น 200 มม./วินาที
รุ่น 6 DOF มีน้ำหนักบรรทุกสูงสุด 2 กิโลกรัม และระยะเอื้อมสูงสุด 664 มิลลิเมตร รุ่น 4 DOF มีน้ำหนักบรรทุกสูงสุด 3 กิโลกรัม และระยะเอื้อมสูงสุด 495 มิลลิเมตร (รูปที่ 5)
 and 6 DOF (right)") รูปที่ 5: โคบอทส์แขนข้อต่อที่มี 4 DOF (ซ้าย) และ 6 DOF (ขวา) (แหล่งที่มาภาพ: Igus)
รูปที่ 5: โคบอทส์แขนข้อต่อที่มี 4 DOF (ซ้าย) และ 6 DOF (ขวา) (แหล่งที่มาภาพ: Igus)
สรุป
เมตาเวิร์สอุตสาหกรรมแบบดื่มด่ำของ iguverse ผสมผสานฝาแฝดทางดิจิทัลและ VR เพื่อให้มีเครื่องมือที่ทำให้การพัฒนาและการใช้งานโซลูชันหุ่นยนต์รวดเร็วขึ้น เป็นฟรี ไม่ต้องมีลิขสิทธิ์ และได้รับการออกแบบมาให้รันบนพีซีโดยไม่ต้องเชื่อมต่อกับคลาวด์ สามารถใช้พัฒนาและทดสอบระบบหุ่นยนต์ได้โดยไม่ต้องมีหุ่นยนต์
รองรับกลศาสตร์ต่างๆ มากมายในหุ่นยนต์เดลต้า หุ่นยนต์แกนทรี แขนหุ่นยนต์ (โคบอท) และหุ่นยนต์สการ่า IRC มีอินเทอร์เฟซมากมายเพื่อรองรับความต้องการด้านอัตโนมัติและปฏิบัติการ ได้แก่ อินเทอร์เฟซ PLC, Modbus TCP/IP, CRI Ethernet, อินเทอร์เฟซ ROS, อินเทอร์เฟซสำหรับกล้องตรวจจับวัตถุ และอินเทอร์เฟซคลาวด์ iguverse, iRC และหุ่นยนต์ที่เกี่ยวข้องจาก Igus ได้รับการเพิ่มประสิทธิภาพให้รองรับความต้องการระบบอัตโนมัติต้นทุนต่ำของ SMEs
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.