ข้อควรพิจารณาที่สำคัญสำหรับการประเมินความปลอดภัยของโคบอทคืออะไร
Contributed By DigiKey's North American Editors
2024-04-03
หุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) ได้รับการออกแบบมาเพื่อทำงานร่วมกับมนุษย์และสนับสนุนการผลิตที่ยืดหยุ่นในโรงงานอุตสาหกรรม 4.0 เมื่อเปรียบเทียบกับหุ่นยนต์อุตสาหกรรมแบบเดิมๆ โคบอทนั้นเรียบง่ายกว่า ตั้งค่าง่ายกว่า และไม่ต้องใช้พื้นที่ทำงานที่แยกออกไปเพื่อความปลอดภัย เนื่องจากได้รับการออกแบบมาให้ทำงานร่วมกับมนุษย์ โคบอทจึงถูกสร้างขึ้นให้แตกต่างจากหุ่นยนต์อุตสาหกรรมอื่นๆ รวมถึงคุณลักษณะต่างๆ เช่น ระบบตรวจจับการชน ระบบแรงย้อนกลับ แอคทูเอเตอร์แบบยืดหยุ่น และเซอร์โวมอเตอร์ความเฉื่อยต่ำ
เนื่องจากการออกแบบมีความแตกต่างกัน จึงได้มีการพัฒนามาตรฐานความปลอดภัยเฉพาะสำหรับโคบอท องค์การระหว่างประเทศว่าด้วยการมาตรฐานข้อกำหนดทางเทคนิค (ISO/TS) 15066 ระบุข้อกำหนดด้านความปลอดภัยและสภาพแวดล้อมการทำงานสำหรับโคบอทอุตสาหกรรม โดยเป็นส่วนเสริมข้อกำหนดและคำแนะนำเกี่ยวกับการทำงานของโคบอทใน ISO 10218-1 และ ISO 10218-2
บทความนี้จะทบทวนข้อกำหนดของ ISO/TS 15066 โดยสังเขป และอธิบายถึงความสอดคล้องกันระหว่าง ISO 10218-1 และ 10218-2 จากนั้นจะพิจารณาความซับซ้อนของการทำงานร่วมกัน รวมถึงวิธีกำหนดพื้นที่ทำงานร่วมกัน โดยจะตรวจสอบปัจจัยที่เกี่ยวข้องกับความปลอดภัยของหุ่นยนต์ เช่น คุณสมบัติด้านความปลอดภัยที่สร้างไว้ในโคบอท และฟังก์ชันความปลอดภัยภายนอกที่จำเป็น พร้อมด้วยอุปกรณ์ตัวอย่าง เช่น พรอกซิมิตี้เซนเซอร์ ม่านแสง และแผ่นสัมผัสเพื่อความปลอดภัย ปิดท้ายด้วยการทบทวนการใช้งานบางส่วนที่เกี่ยวข้องกับข้อควรพิจารณาด้านความปลอดภัยของโคบอทโดยเฉพาะ
มีมาตรฐานความปลอดภัยที่สำคัญหลายประการสำหรับหุ่นยนต์อุตสาหกรรมและโคบอท โดย ISO/TS 15066 จะกล่าวถึงข้อกำหนดด้านความปลอดภัยสำหรับระบบโคบอทอุตสาหกรรมและสภาพแวดล้อมการทำงาน และเพื่อต่อยอดและเสริมข้อกำหนดที่จำกัดในมาตรฐานก่อนหน้านี้ เช่น ชุดมาตรฐาน ISO 10218 ซึ่ง ISO 10218-1 มุ่งเน้นไปที่หุ่นยนต์ทั่วไปและอุปกรณ์หุ่นยนต์ ในขณะที่ ISO 10218-2 มุ่งเน้นไปที่ระบบหุ่นยนต์และการบูรณาการ American National Standards Institute/Robotics Industry Association (ANSI/RIA) R15.06 คือการนำ ISO 10218-1 และ ISO 10218-2 มาใช้ในระดับประเทศ
ความซับซ้อนของการทำงานร่วมกัน
ก่อนที่จะลงรายละเอียดเกี่ยวกับความปลอดภัยของโคบอท ควรให้คำจำกัดความของคำว่าร่วมปฏิบัติงาน การทำงานร่วมกันหรือร่วมปฏิบัติงานในด้านวิทยาการหุ่นยนต์มีความซับซ้อนและมีปัจจัยสามประการ:
- โคบอท คือ "หุ่นยนต์ที่ออกแบบมาเพื่อปฏิสัมพันธ์โดยตรงกับมนุษย์ภายในพื้นที่ทำงานร่วมกันที่กำหนดไว้" ตามข้อกำหนดของ ANSI/RIA R15.06
- การปฏิบัติการร่วมกัน คือ "สถานะที่ระบบหุ่นยนต์ที่ได้รับการออกแบบโดยมีจุดประสงค์และผู้ปฏิบัติงานทำงานภายในพื้นที่ทำงานร่วมกัน" ตามมาตรฐาน ISO/TS 15066
- สุดท้ายนี้ พื้นที่ทำงานร่วมกัน คือ "พื้นที่ทำงานภายในพื้นที่ป้องกัน ซึ่งหุ่นยนต์และมนุษย์สามารถทำงานพร้อมกันระหว่างการดำเนินการผลิต" ตามมาตรฐาน ANSI/RIA R15.06
คำจำกัดความของพื้นที่ทำงานร่วมกัน คือ "ภายในพื้นที่ที่ได้รับการคุ้มครอง" โดยพื้นที่ที่ได้รับการคุ้มครองประกอบด้วยชั้นการป้องกันความปลอดภัย นอกเหนือจากฟังก์ชันความปลอดภัยมาตรฐานที่รวมอยู่ในโคบอท
คุณสมบัติการป้องกันทั่วไปที่รวมอยู่ในโคบอท ได้แก่ ระบบตรวจจับการสัมผัสโดยอิงจากการวัดแรงบิดที่ข้อต่อทุกจุด ซึ่งจะตรวจสอบการกระแทก สิ่งกีดขวาง หรือแรงหรือแรงบิดที่มากเกินไป ควรมีระบบเบรกอัตโนมัติและการปลดเบรกแบบแมนนวลสำหรับการเคลื่อนแขนโดยไม่มีกำลัง
โคบอทสัมผัสกับบุคคลโดยไม่คาดคิดถือเป็นข้อกังวลเป็นพิเศษ มาตรฐานกำหนดว่าควรป้องกันการสัมผัสบริเวณใดก็ตามบนศีรษะของบุคคล นอกจากนี้ มาตรฐานยังแบ่งส่วนของร่างกายออกเป็น 29 ส่วนเฉพาะและข้อจำกัดรายละเอียดสำหรับการสัมผัส 2 ประเภท:
- การสัมผัสชั่วคราว คือการเคลื่อนที่และเหตุการณ์ไดนามิกซึ่งโคบอทชนเข้ากับบุคคล ข้อจำกัดจะขึ้นอยู่กับตำแหน่ง ความเฉื่อย และความเร็วสัมพัทธ์
- การสัมผัสกึ่งคงที่เกิดขึ้นเมื่อส่วนของร่างกายติดอยู่ระหว่างโคบอทกับพื้นผิว ข้อจำกัดขึ้นอยู่กับแรงกดและแรงที่เกี่ยวข้องกับการกระแทกและการหนีบ
ข้อมูลจำเพาะนี้เป็นเพียงคำแนะนำ ไม่ใช่ข้อจำกัดที่แน่นอน ซึ่งจะขึ้นอยู่กับการพิจารณาการใช้งาน นอกจากนี้ยังระบุด้วยว่าคำแนะนำดังกล่าวเป็นข้อมูลและสะท้อนถึงแนวทางปฏิบัติที่ดีที่สุดในปัจจุบัน เนื่องจากการทำงานร่วมกันระหว่างผู้คนกับหุ่นยนต์เป็นสาขาใหม่และอยู่ระหว่างการวิจัย
ความร่วมมืออย่างต่อเนื่อง
การทำงานร่วมกันทางเดียวจะไม่เกิดขึ้น ผู้คนและโคบอทสามารถโต้ตอบและทำงานร่วมกันได้อย่างต่อเนื่อง โดยการทำงานร่วมกันมีตั้งแต่การอยู่ร่วมกัน โดยที่หุ่นยนต์หยุดทำงานเมื่อมีคนเข้าไปในพื้นที่ทำงานร่วมกัน ไปจนถึงกิจกรรมเชิงโต้ตอบกับบุคคลที่สัมผัสโคบอทขณะทำงาน (รูปที่ 1)
 รูปที่ 1: การทำงานร่วมกันของมนุษย์และหุ่นยนต์ประกอบด้วยระดับปฏิสัมพันธ์ที่เป็นไปได้ที่หลากหลาย (แหล่งที่มาภาพ: SICK)
รูปที่ 1: การทำงานร่วมกันของมนุษย์และหุ่นยนต์ประกอบด้วยระดับปฏิสัมพันธ์ที่เป็นไปได้ที่หลากหลาย (แหล่งที่มาภาพ: SICK)
จำเป็นต้องมีการประเมินความเสี่ยงเพื่อระบุความต้องการด้านความปลอดภัยของการทำงานร่วมกันแต่ละรายการ รวมถึงการระบุ การประเมิน และลดอันตรายและความเสี่ยงที่เกี่ยวข้องกับการใช้งาน โดย ISO 10218 ประกอบด้วยรายการคุณลักษณะด้านความปลอดภัยที่เหมาะสมในสถานการณ์ต่าง ๆ แต่ไม่มีข้อกำหนดขั้นสุดท้าย และ ISO/TS 15066 มีรายละเอียดเพิ่มเติมเกี่ยวกับการประเมินความเสี่ยงของโคบอท ในแต่ละกรณี เป้าหมายของการประเมินความเสี่ยงคือการระบุอุปกรณ์และระบบความปลอดภัยภายนอกที่จำเป็นเพื่อให้แน่ใจว่ามีการทำงานร่วมกันอย่างปลอดภัย
หากต้องการศึกษาลงลึกเกี่ยวกับการประเมินความเสี่ยงและหุ่นยนต์ โปรดดูบทความ "บูรณาการ AMR เข้ากับการดำเนินงานอุตสาหกรรม 4.0 ได้อย่างปลอดภัยและมีประสิทธิภาพเพื่อผลประโยชน์สูงสุด"
การป้องกันและประสิทธิภาพ
แม้ว่าโคบอทได้รับการออกแบบเพื่อการทำงานที่ปลอดภัย แต่ชั้นการป้องกันเพิ่มเติมสามารถปรับปรุงประสิทธิภาพของการทำงานร่วมกันได้ หากไม่มีความปลอดภัยเพิ่มเติม เมื่อบุคคลเข้าไปในพื้นที่ทำงานร่วมกัน ISO/TS 15066 จะกำหนดความเร็วสูงสุดที่ 0.25 เมตรต่อวินาที (m/s) ต่อแกน สำหรับโคบอทส่วนใหญ่นั้นช้ามาก
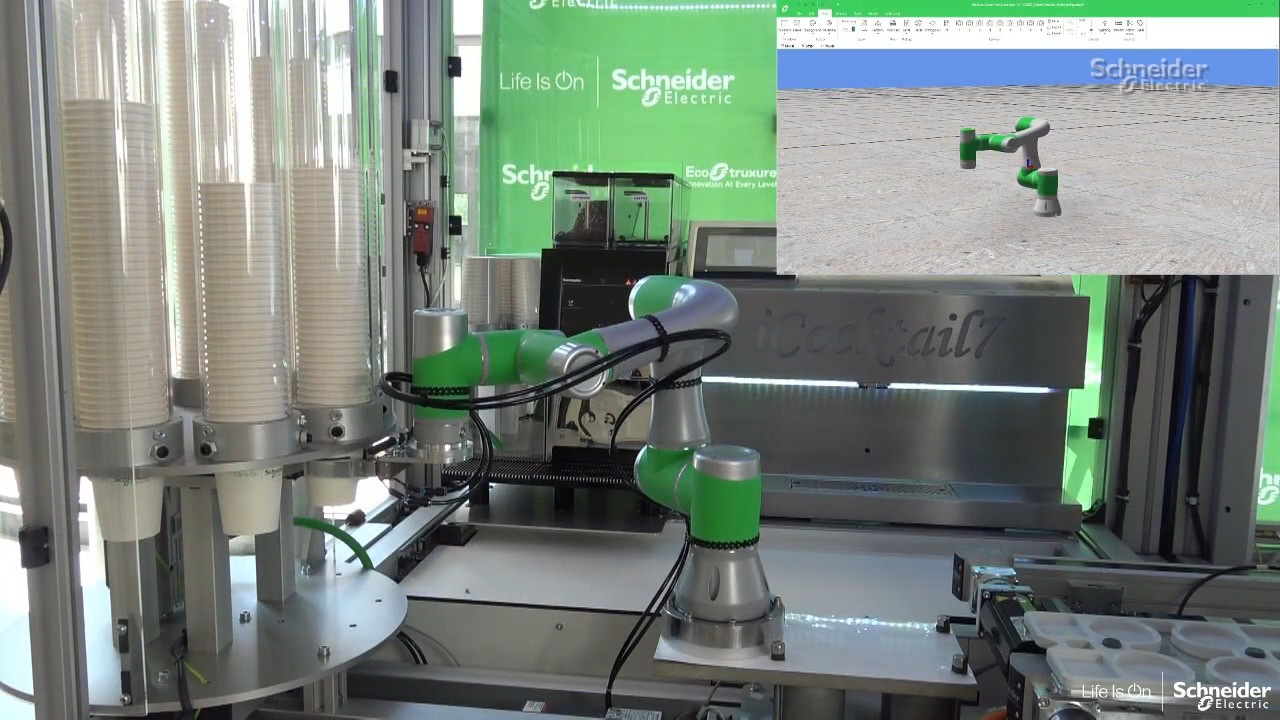
ตัวอย่างเช่นโคบอท Lexium LXMRL12S0000 จาก Schneider Electric มีน้ำหนักบรรทุกสูงสุด 12 กิโลกรัม (กก.) รัศมีการทำงาน (ช่วงการทำงาน) 1327 มิลลิเมตร (มม.) ความแม่นยำของตำแหน่ง ±0.03 มม. และความเร็วสูงสุดของปลายเครื่องมือ 3 เมตรต่อวินาที (m/s) เร็วกว่าค่าสูงสุดที่อนุญาตโดย ISO/TS 15066 ถึง 12 เท่า เมื่อบุคคลอยู่ในพื้นที่ทำงานร่วมกัน (รูปที่ 2)
 รูปที่ 2: โคบอทนี้สามารถเคลื่อนที่ได้เร็วกว่าค่าสูงสุดที่ ISO/TS 15066 อนุญาตถึง 12 เท่า เมื่อมีคนอยู่ในพื้นที่ทำงานร่วมกัน (แหล่งที่มาภาพ: Schneider Electric)
รูปที่ 2: โคบอทนี้สามารถเคลื่อนที่ได้เร็วกว่าค่าสูงสุดที่ ISO/TS 15066 อนุญาตถึง 12 เท่า เมื่อมีคนอยู่ในพื้นที่ทำงานร่วมกัน (แหล่งที่มาภาพ: Schneider Electric)
ในการใช้งานหลายอย่าง โคบอทสามารถทำงานได้โดยลำพังเป็นเวลานาน ดังนั้นการตรวจจับว่ามีหรือไม่มีผู้คนในพื้นที่ทำงานร่วมกันช่วยให้การดำเนินงานเร็วขึ้นและมีประสิทธิภาพมากขึ้นเมื่อไม่มีคนอยู่ โดยอุปกรณ์ทั่วไปสำหรับตรวจจับการมีอยู่ของบุคคล ได้แก่ เครื่องสแกนเพื่อความปลอดภัย ม่านกันแสง และพรมปูพื้นแบบสัมผัสเพื่อความปลอดภัย แต่ละเทคโนโลยีมีคุณประโยชน์ที่แตกต่างกัน และมักจะใช้ร่วมกัน
เครื่องสแกนความปลอดภัย
เครื่องสแกนความปลอดภัยจะตรวจสอบพื้นที่ที่กำหนดเพื่อตรวจจับการมีอยู่ของผู้คน พวกเขาสามารถกำหนดได้ว่าบุคคลอยู่ห่างจากบุคคลเพียงใด และใช้โซนเตือนต่างๆ นอกเหนือจากโซนความปลอดภัยแบบแอคทีฟ
Omron โมเดล OS32C-SP1-4M เป็นตัวอย่างที่ดีของเครื่องสแกนเลเซอร์นิรภัยที่ออกแบบมาเพื่อใช้กับโคบอท มีรัศมีความปลอดภัยสูงสุด 4 เมตร (ม.) และสามารถรองรับโซนเตือนภัยได้หลายโซนสูงสุด 15 เมตร ประกอบด้วยชุดโซนความปลอดภัยและโซนเตือนมาตรฐาน 70 ชุด เพื่อรองรับพื้นที่ทำงานร่วมกันที่ซับซ้อน นอกจากนี้ ความละเอียดของวัตถุขั้นต่ำสามารถตั้งค่าเป็น 30, 40, 50 หรือ 70 มม. และเวลาตอบสนองสามารถอยู่ในช่วงตั้งแต่ 80 มิลลิวินาที (ms) ถึง 680 ms ซึ่งช่วยเพิ่มความยืดหยุ่นในการใช้งาน (รูปที่ 3)
 รูปที่ 3: เครื่องสแกนความปลอดภัยนี้มีรัศมีความปลอดภัยสูงสุด 4 ม. และสามารถรองรับโซนเตือนหลายโซนได้สูงสุด 15 ม. (แหล่งที่มาภาพ: DigiKey)
รูปที่ 3: เครื่องสแกนความปลอดภัยนี้มีรัศมีความปลอดภัยสูงสุด 4 ม. และสามารถรองรับโซนเตือนหลายโซนได้สูงสุด 15 ม. (แหล่งที่มาภาพ: DigiKey)
ม่านแสง
ม่านแสงสามารถวัดการมีอยู่ของผู้คน และออกแบบมาเพื่อตรวจจับวัตถุขนาดต่างๆ เช่น นิ้วมือหรือมือ ม่านแสงไม่ได้วัดระยะทางต่างจากเครื่องสแกนความปลอดภัย โดยจะส่งชุดลำแสงระหว่างตัวปล่อยเชิงเส้นและอาร์เรย์ตัวรับ และสามารถตรวจจับได้เมื่อวัตถุหักลำแสงตั้งแต่หนึ่งลำแสงขึ้นไป
ในแง่ของระดับความปลอดภัย มีการจำแนกประเภทม่านแสงหลักสองประเภท: Type 2 และ Type 4 มีรูปลักษณ์ภายนอกที่คล้ายคลึงกัน แต่ได้รับการออกแบบมาเพื่อให้มีระดับความปลอดภัยที่แตกต่างกัน โดย Type 4 ตรวจสอบพื้นที่ที่ได้รับการป้องกันซึ่งกำหนดพื้นที่ทำงานร่วมกัน และม่านแสง Type 2 ได้รับการออกแบบมาเพื่อการใช้งานที่มีความเสี่ยงต่ำ
ม่านแสงป้องกันขอบเขตและมีให้เลือกหลายระดับความละเอียด เช่น 14 มม. (มม.) สำหรับการตรวจจับนิ้วมือ และ 24 มม. สำหรับการตรวจจับมือ โดยโมเดล SLC4P24-160P44 จาก Banner Engineering คือชุดม่านแสง Type 4 ที่มีอาร์เรย์ตัวปล่อยและตัวรับ และมีความละเอียด 24 มม. เพื่อปกป้องผู้คนและเครื่องจักร เช่น โคบอท (รูปที่ 4) ซึ่งตัวส่งจะมีชุดไดโอดเปล่งแสงอินฟราเรดมอดูเลตแบบซิงโครไนซ์ และตัวรับสัญญาณจะมีชุดตัวตรวจจับแสงแบบซิงโครไนซ์ที่สอดคล้องกัน ตัวส่งสัญญาณมีระยะ 2 เมตร และม่านกันแสงเหล่านี้สามารถติดตั้งได้ในความยาวตั้งแต่ 160 ถึง 320 มม. โดยเพิ่มทีละ 80 มม.
 รูปที่ 4: ม่านแสง Type 4 นี้มีความละเอียด 24 มม. (แหล่งที่มารูปภาพ: Banner Engineering)
รูปที่ 4: ม่านแสง Type 4 นี้มีความละเอียด 24 มม. (แหล่งที่มารูปภาพ: Banner Engineering)
เครื่องสแกนเลเซอร์นิรภัยและม่านแสงเป็นเครื่องมือแบบไม่สัมผัสเพื่อเพิ่มความปลอดภัยของพื้นที่ทำงานร่วมกัน อย่างไรก็ตาม อาจเป็นเรื่องยากที่จะใช้ในสภาพแวดล้อมที่ท้าทายการมองเห็น เช่น พื้นที่ที่มีพื้นผิวสะท้อนแสงสูงซึ่งสามารถส่งการรบกวนแสงที่ไม่ต้องการได้ และอาจทำงานติดขัดได้เนื่องจากมีน้ำมันหรือจาระบีรั่วไหล หรือมีฝุ่นหรือความชื้นมากเกินไป
เซ็นเซอร์ออปติคัลเหล่านี้บางตัวมีการปรับความไวที่สามารถช่วยลดการรบกวนบางประเภทได้ การปรับความไวเหล่านั้นยังช่วยเพิ่มเวลาตอบสนองและประสิทธิภาพอื่นๆ ที่ลดลงอีกด้วย อีกวิธีหนึ่งคือการใช้แผ่นสัมผัสเพื่อความปลอดภัยร่วมกับอุปกรณ์ตรวจจับแสง
แผ่นสัมผัสเพื่อความปลอดภัย
แผ่นสัมผัสนิรภัยมีแผ่นนำไฟฟ้าสองแผ่นคั่นด้วยชั้นฉนวนแรสเตอร์ และสามารถใช้เดี่ยวๆ หรือใช้ร่วมกับเซ็นเซอร์ประเภทอื่นๆ ได้ หากมีคนเหยียบบนแผ่น แผ่นนำไฟฟ้าด้านบนจะถูกกดลงและสัมผัสกับแผ่นด้านล่าง ทำให้เกิดสัญญาณเตือน (รูปที่ 5) โดนด้านนอกของแผ่นเป็นวัสดุโพลียูรีเทนที่ทนทานต่อการลื่นและกันน้ำ สิ่งสกปรก และน้ำมัน แผ่นสัมผัสรุ่น SENTIR 1602-5533 จาก ASO Safety Solutions สามารถเชื่อมต่อแผ่นสัมผัสได้สูงสุด 10 แผ่นต่ออนุกรมเข้ากับหน่วยตรวจสอบเดียวเพื่อความครอบคลุมสูงสุด 10 ม2
 รูปที่ 5: เมื่อเหยียบขึ้นไป ชั้นสื่อกระแสไฟฟ้าด้านบนและด้านล่างของแผ่นรองนิรภัยจะสัมผัสกัน ทำให้เกิดสัญญาณเตือน (แหล่งที่มาภาพ: ASO Safety Solutions)
รูปที่ 5: เมื่อเหยียบขึ้นไป ชั้นสื่อกระแสไฟฟ้าด้านบนและด้านล่างของแผ่นรองนิรภัยจะสัมผัสกัน ทำให้เกิดสัญญาณเตือน (แหล่งที่มาภาพ: ASO Safety Solutions)
ความปลอดภัยมีความละเอียดอ่อน
ไม่มีสูตรสำเร็จเดียวที่รับประกันความปลอดภัย การทำงานร่วมกันแต่ละแบบมีความแตกต่างกัน และจำเป็นต้องได้รับการจัดการตามคุณลักษณะและความต้องการเฉพาะตัว ปัจจัยสำคัญคือ: การใช้งานอยู่ที่จุดใดของการทำงานร่วมกันอย่างต่อเนื่อง (ดูรูปที่ 1) ยิ่งปฏิสัมพันธ์ระหว่างโคบอทกับคนใกล้ชิดกันมากขึ้นเท่าใด การป้องกันก็เป็นสิ่งจำเป็นมากขึ้นเท่านั้น
มีรายละเอียดเพิ่มเติมให้พิจารณา บางส่วนได้แก่:
- พื้นที่ทำงานแต่ละแห่งต้องได้รับการประเมินความเสี่ยงโดยละเอียดเพื่อดูว่าโคบอทถูกย้ายจากเวิร์กสเตชันหนึ่งไปยังเวิร์กสเตชันหนึ่งหรือไม่ แม้ว่าจะดูเหมือนกัน แต่ความแตกต่างเล็กๆ น้อยๆ ก็สามารถสร้างความแตกต่างด้านความปลอดภัยได้
- หากเครื่องจักรอื่นๆ อยู่ในพื้นที่ทำงานร่วมกัน จำเป็นต้องเชื่อมโยงกับระบบการปิดระบบหรือการชะลอตัวด้านความปลอดภัยของโคบอทหรือไม่
- บทความนี้มุ่งเน้นไปที่ฮาร์ดแวร์ที่เกี่ยวข้องกับความปลอดภัย แต่สำหรับระบบเครือข่ายที่แพร่หลายมากขึ้น ความปลอดภัยทางไซเบอร์ถือเป็นข้อพิจารณาที่สำคัญเพื่อป้องกันการแทรกแซงการทำงานของโคบอทหรือระบบความปลอดภัย
สรุป
ความปลอดภัยของโคบอทมีความซับซ้อน เริ่มต้นด้วยการกำหนดพื้นที่ทำงานร่วมกันภายในพื้นที่ที่ได้รับการป้องกัน และต้องมีการประเมินความเสี่ยงของการดำเนินงานร่วมกัน โดยมีมาตรฐานต่างๆ เช่น ISO/TS 15066 และซีรีส์ ISO 10218 มีความสำคัญและให้คำแนะนำและแนวปฏิบัติ ซึ่งโคบอทส์จะมีคุณสมบัติด้านความปลอดภัยขั้นพื้นฐาน เช่น ระบบตรวจจับการชน ระบบตอบสนองแรง แอคชูเอเตอร์แบบยืดหยุ่น และเซอร์โวมอเตอร์ความเฉื่อยต่ำ อาจจำเป็นต้องใช้อุปกรณ์ความปลอดภัยเพิ่มเติม เช่น พรอกซิมิตี้เซนเซอร์ ม่านแสง และแผ่นสัมผัสเพื่อความปลอดภัย ทั้งนี้ขึ้นอยู่กับลักษณะเฉพาะของการใช้งานร่วมกัน
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.